Vehicle positioning method and device, vehicle and readable storage medium
A vehicle positioning and vehicle technology, applied in the direction of measuring devices, satellite radio beacon positioning systems, instruments, etc., can solve the problems of trajectory jump, positioning error, and error accumulation, and achieve the effect of good positioning accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
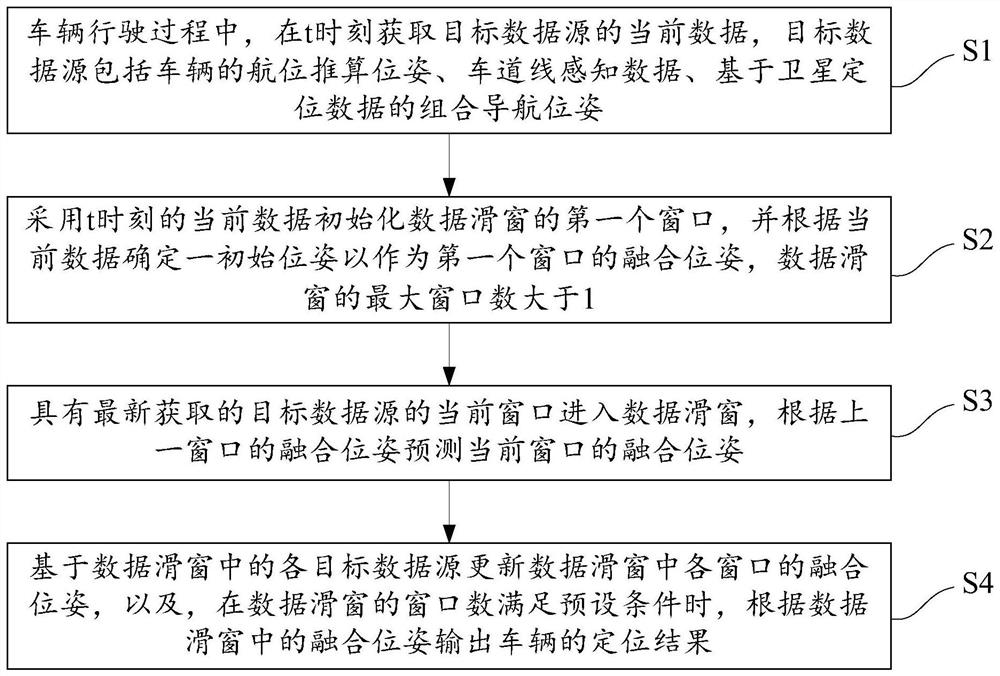
[0054] figure 1 It is a schematic flowchart of the vehicle positioning method according to the first embodiment of the present application. Such as figure 1 As shown, the vehicle positioning method of the present application includes the following steps:
[0055] S1: During the driving process of the vehicle, obtain the current data of the target data source at time t. The target data source includes the vehicle's dead reckoning pose, lane line perception data, and integrated navigation pose based on satellite positioning data;
[0056] Optionally, the moment t is a certain moment during the driving of the vehicle, for example, it may be the moment when the vehicle has traveled 100 meters or one minute. It should be noted that after the vehicle starts to drive, the vehicle’s dead reckoning pose, lane line perception data, and integrated navigation pose based on satellite positioning data can be calculated. Acquiring the current data at time t indicates that the pose is start...
no. 2 example
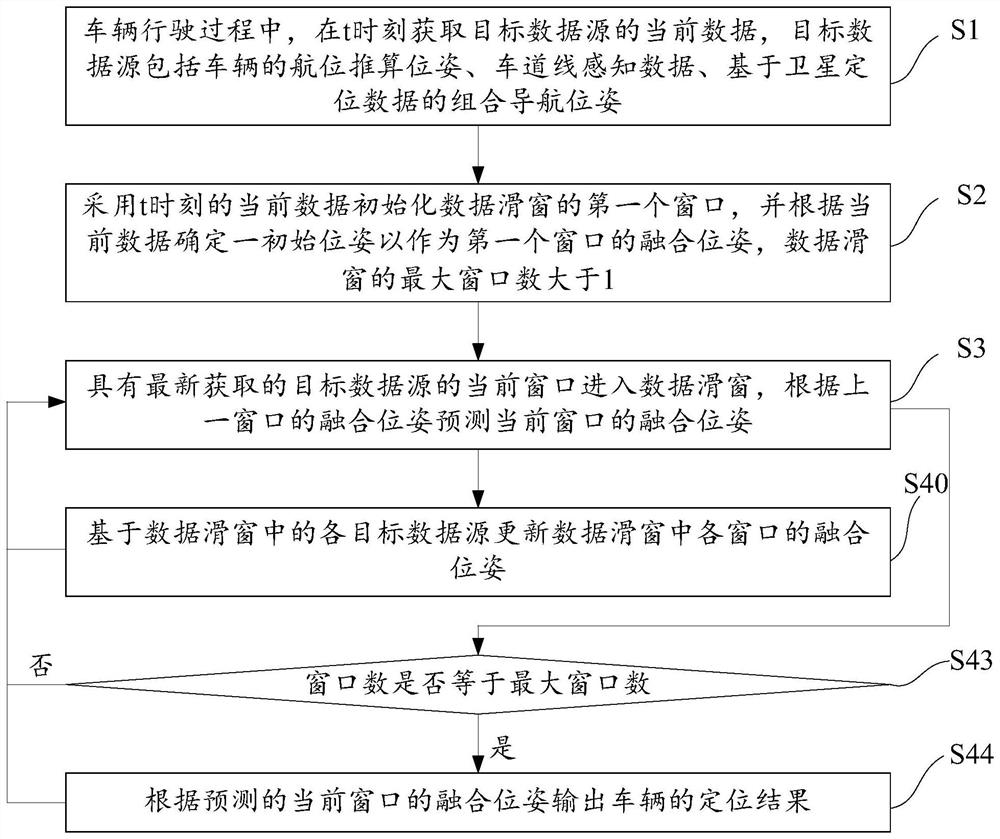
[0103] Figure 6 It is a schematic flowchart of the vehicle positioning method according to the second embodiment of the present application. Such as Figure 6 As shown, the vehicle positioning method of the present application includes the following steps:
[0104] S1: During the driving process of the vehicle, obtain the current data of the target data source at time t. The target data source includes the vehicle's dead reckoning pose, lane line perception data, and integrated navigation pose based on satellite positioning data;
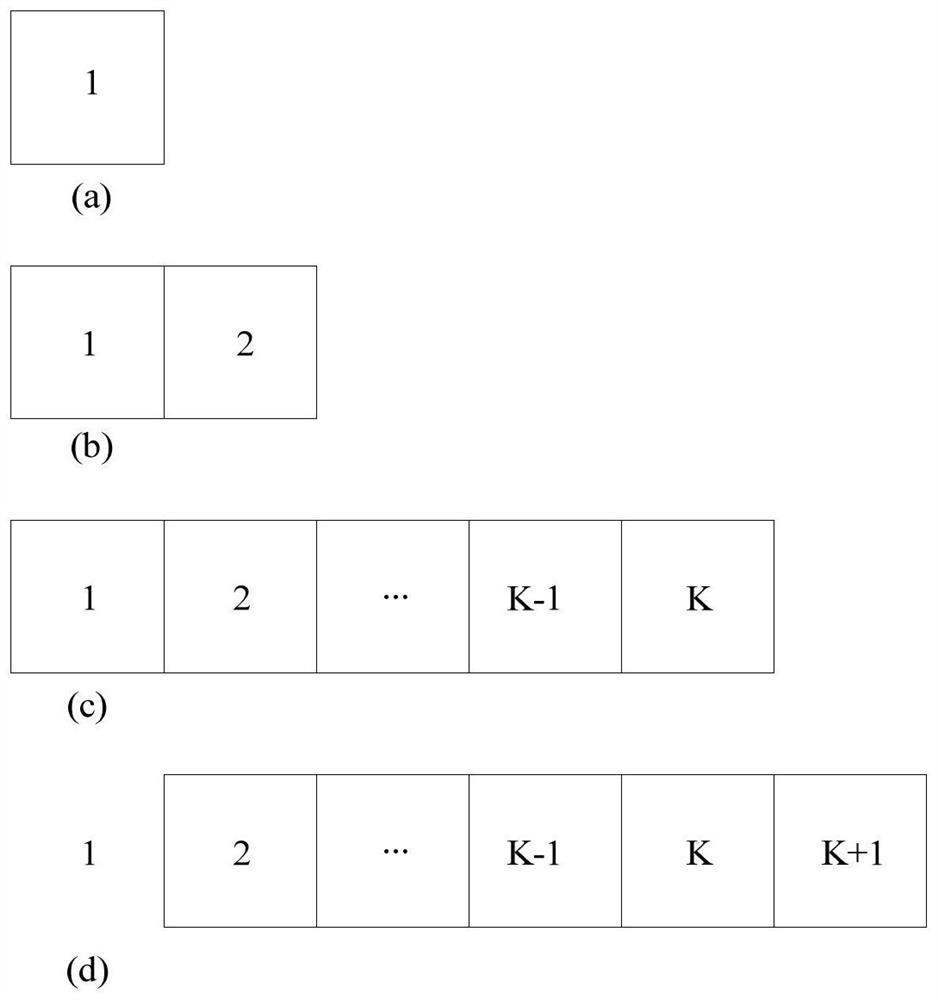
[0105] S2: Use the current data at time t to initialize the first window of the data sliding window, and determine an initial pose as the fusion pose of the first window according to the current data, and the maximum number of windows of the data sliding window is greater than 1;
[0106] S3: The current window composed of the latest acquired current data enters the data sliding window, and predicts the fusion pose of the current window according...
no. 3 example
[0117] The difference between this embodiment and the first embodiment and the second embodiment is that if the window number of the data sliding window meets the preset condition, then output the positioning result of the vehicle according to the fusion pose of the current window predicted in step S3, and, Outputting the positioning result of the vehicle according to the updated fusion pose in step S40. That is to say, the pose prediction result and update result can be output together for the user's reference at the same time.
[0118] Other steps of this embodiment are the same as those of the first embodiment or the second embodiment, and will not be repeated here.
[0119] As mentioned above, the vehicle positioning method provided by this application uses the current data of the target data source to initialize the first window of the data sliding window and determine the fusion pose of the first window. The target data source includes the combined navigation pose of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More