

Guiding method and system for crossing visual target point based on specified course of unmanned aerial vehicle
A technology for drones and target points, which is applied in the field of drone navigation and can solve problems such as no solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
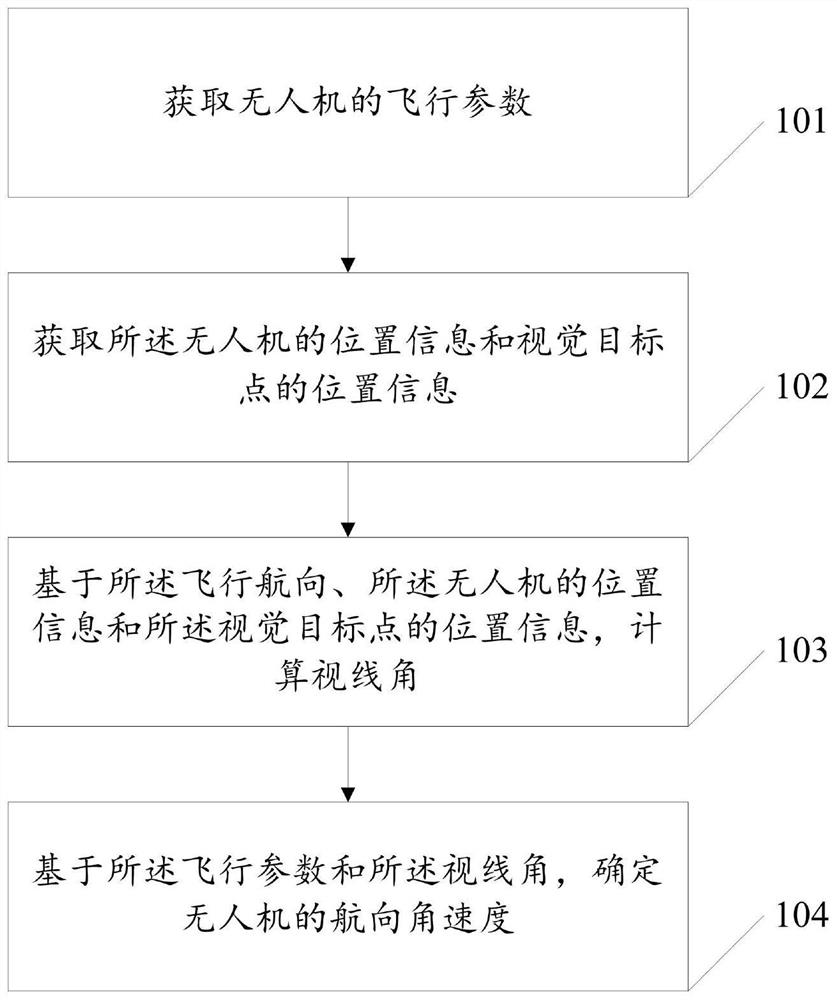
[0046] see figure 1 , this embodiment provides a guidance method based on the specified course of the UAV passing through the visual target point, which can solve the problem that the UAV flies over the visual target point with the specified course, including:
[0047] Step 101: Obtain flight parameters of the drone; the flight parameters include flight speed, flight heading and specified heading.
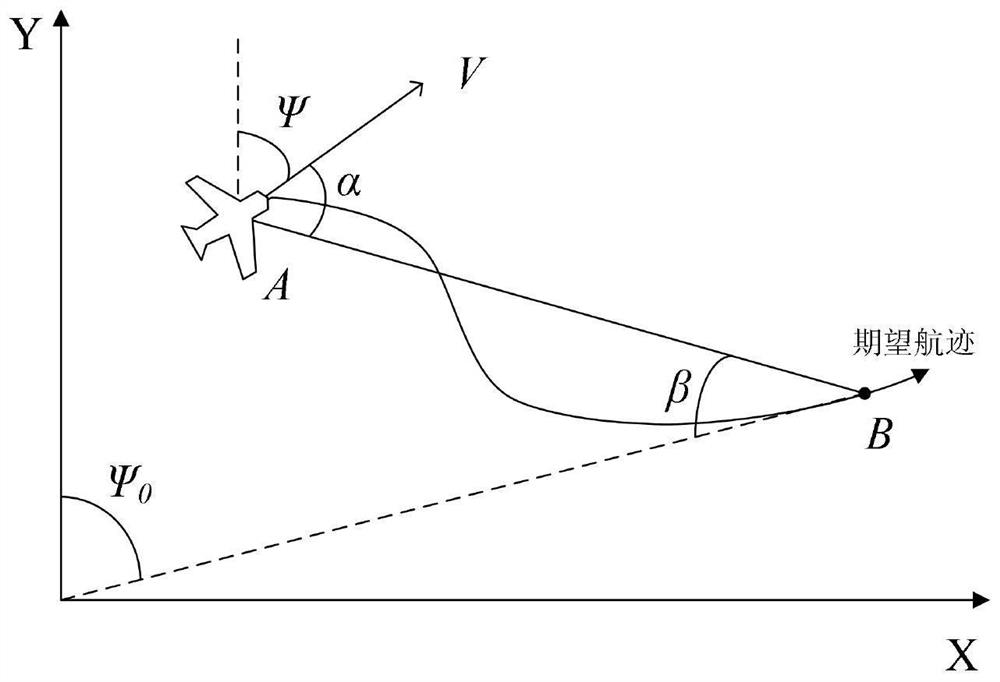
[0048] An example is: the flight speed of the UAV is V, and the flight course is based on the north direction, clockwise from 0 to 360°, denoted as Ψ; the specified course is the direction of the visual target point that the UAV flight track requires, denoted as Ψ 0 .
[0049] Step 102: Obtain the position information of the drone and the position information of the visual target point.
[0050] An example is: the current position A of the drone and the current position B of the visual target point are obtained in real time by the onboard sensor carried by the drone.
[0051] S...
Embodiment 2
[0072] This embodiment provides a guidance system based on the designated course of the UAV to pass through the visual target point, such as Figure 4 shown, including:
[0073] The flight parameter acquisition module 401 is used to acquire the flight parameters of the drone; the flight parameters include flight speed, flight heading and specified heading.
[0074] The position information obtaining module 402 is configured to obtain the position information of the drone and the position information of the visual target point.
[0075] A line of sight angle calculation module 403, configured to calculate a line of sight angle based on the flight heading, the position information of the drone, and the position information of the visual target point.
[0076] The heading angular velocity calculation module 404 is configured to determine the heading angular velocity of the UAV based on the flight parameters and the line-of-sight angle; the heading angular velocity is used to pas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More