Pole fastening mechanism and assembly line
A technology for fastening mechanisms and fastening devices, which can be used in workpiece clamping devices, metal processing equipment, metal processing, etc., and can solve time-consuming problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
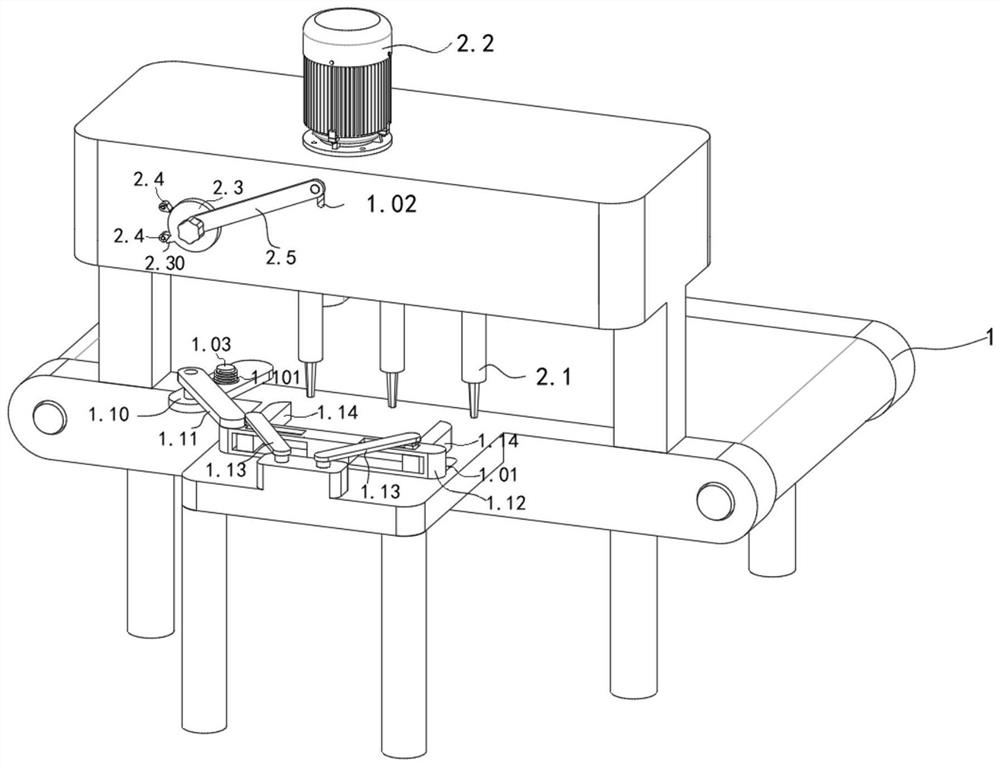
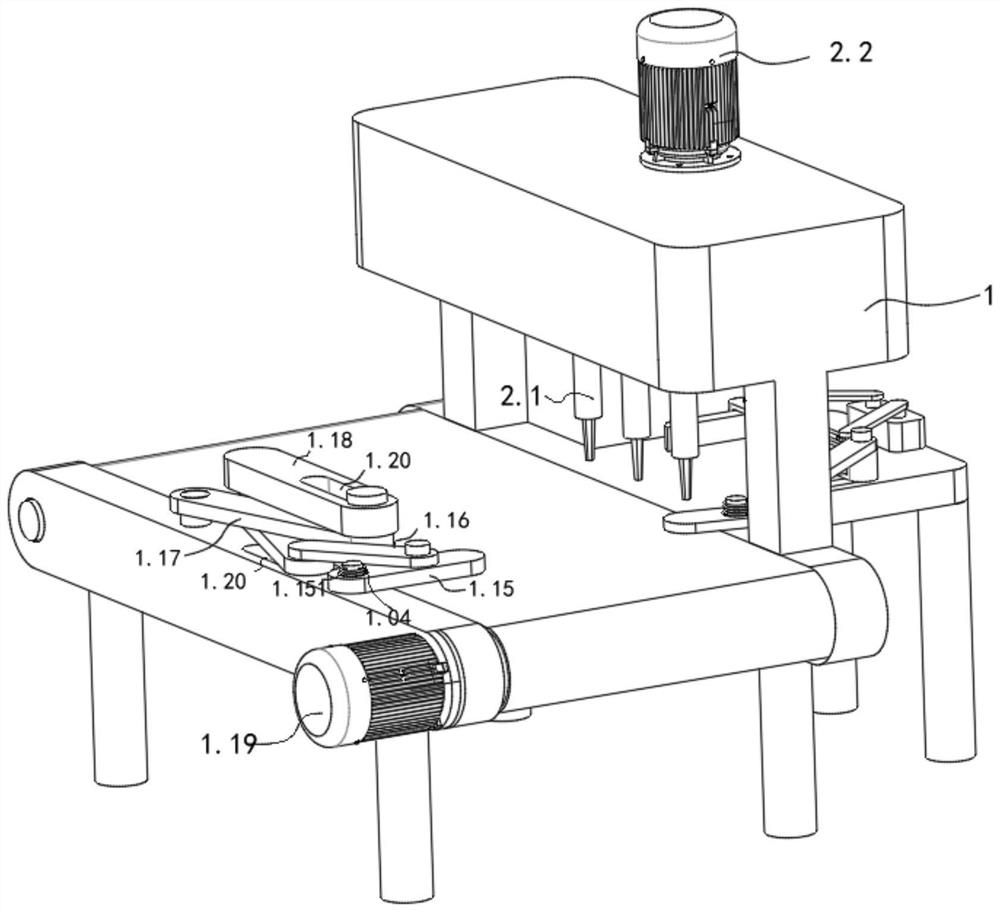
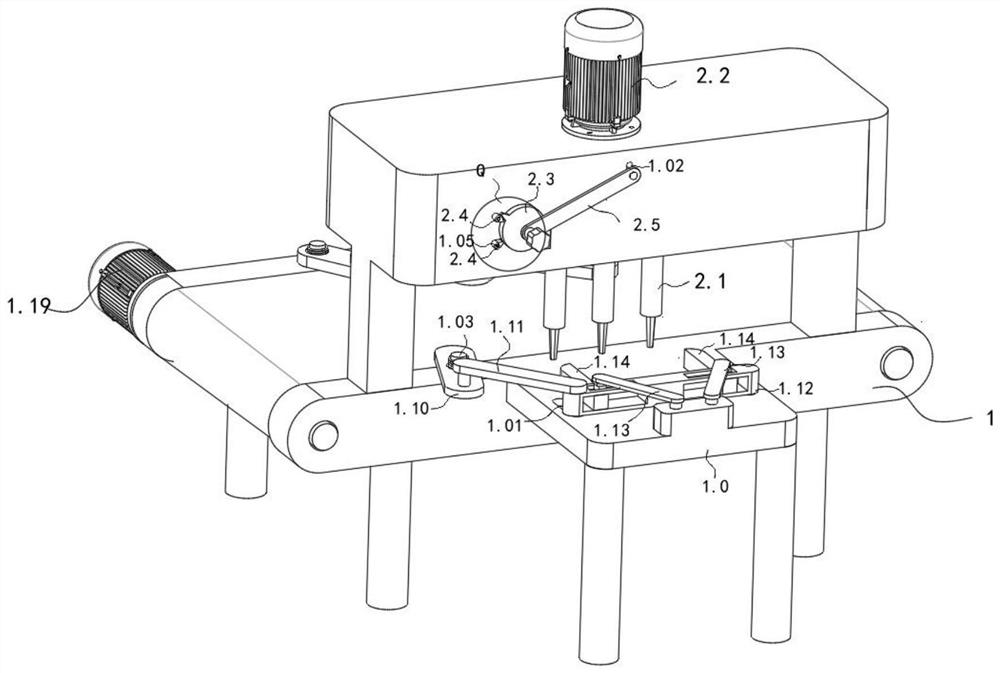
[0045] refer to Figure 1-7b As shown, the present invention provides a pole fastening mechanism, including a frame 1, on which a plurality of screwdrivers 2.1 are slidably arranged; also includes a connecting rod assembly: it is arranged on the frame 1;
[0046] Each screwdriver 2.1 is connected to the connecting rod assembly;
[0047] The expansion and contraction of the connecting rod assembly realizes the adjustment of the horizontal distance between each screwdriver 2.1.
[0048] The connecting rod assembly includes a center seat 2.10 rotatably connected to the frame 1, and a plurality of screwdrivers 2.1 support assemblies are arranged symmetrically in the radial direction of the center seat 2.10.
[0049]Specifically, the frame 1 is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



