

Robot obstacle-avoiding route planning method based on virtual scene
A path planning and virtual scene technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of not meeting the real-time requirements of online planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
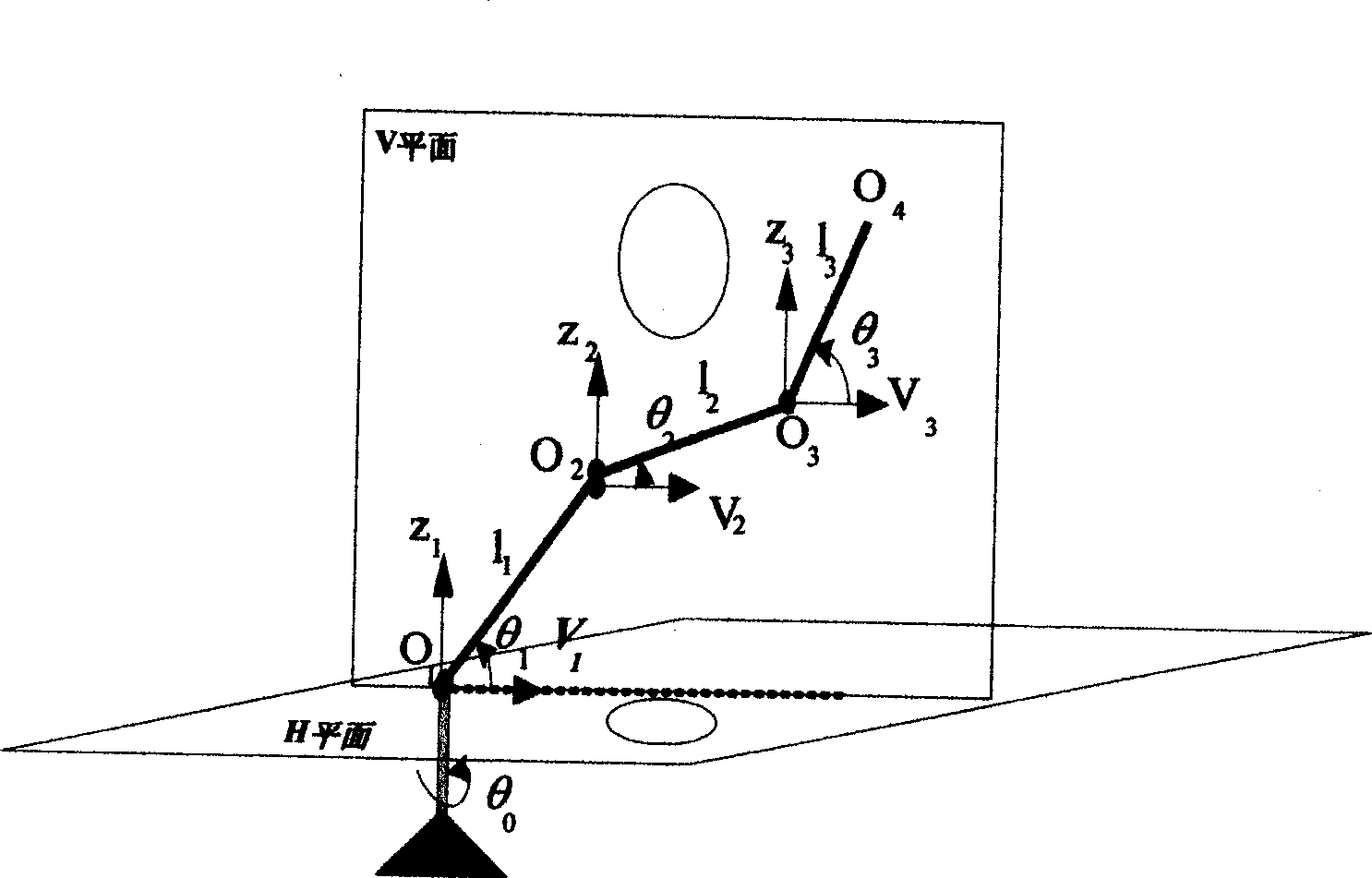
[0022] In view of the difficulty in establishing the C space of the current C space method, and the large amount of calculation, the artificial potential field method is only a local planning, and the space robot obstacle avoidance path planning is rarely studied. In order to meet the requirements of real-time planning and high efficiency, We propose to transform the three-dimensional problem into a two-dimensional problem to solve the obstacle avoidance path planning problem of the six-degree-of-freedom space manipulator.
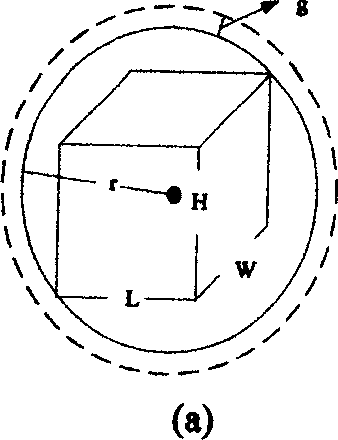
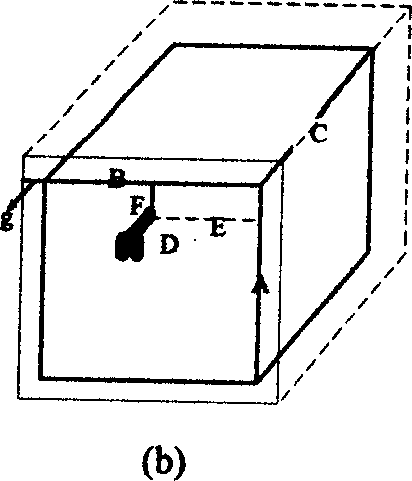
[0023] This method uses the envelope of the regular body to model the obstacle, and fully combines the ideas of the joint space method and the C space method. On the premise of maintaining high precision, the obstacle domain is determined by projection on the H and V planes. Transform the 3D obstacle avoidance path planning problem into a 2D problem in two planes. The method is small in calculation, simple, intuitive and easy to implement.
[0024] (1) Us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More