

Orthopedic robot navigation device and positioning system
A navigation device and robot technology, applied in surgical robots, stereotaxic surgical instruments, instruments, etc., can solve the problems of adjusting the relative position of the guide device, inaccurate positioning, and only suitable for tibia or femur
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described below in conjunction with the accompanying drawings.
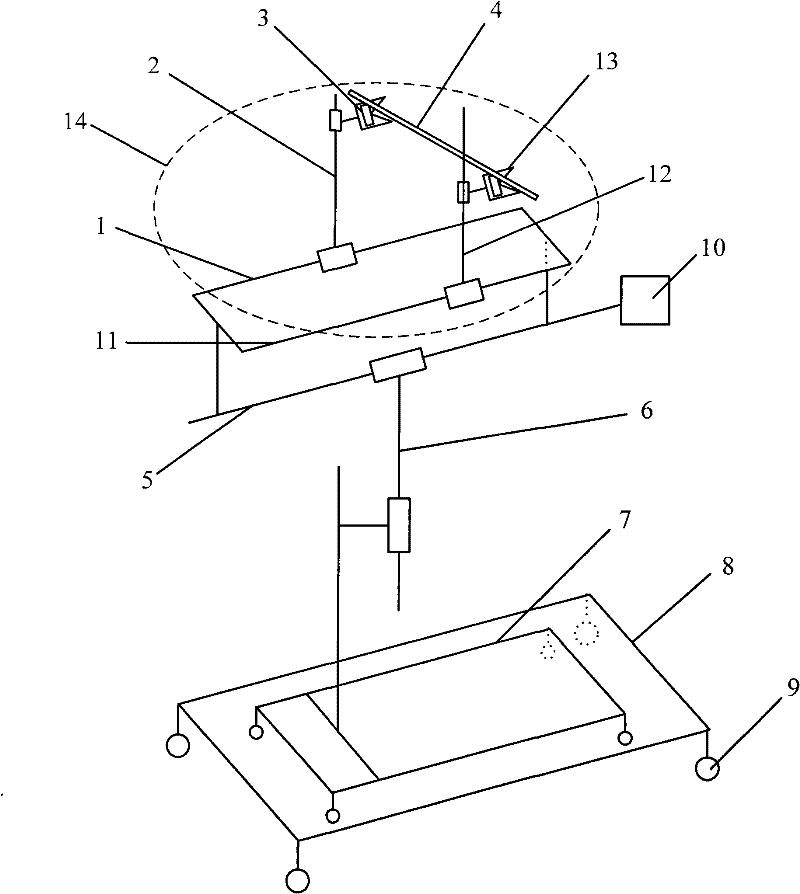
[0028] figure 1 It is a structural schematic diagram of a preferred embodiment of the orthopedic robot navigation device of the present invention, which includes a four-degree-of-freedom dual-plane positioning mechanism 14, a horizontal adjustment assembly 5, a height adjustment assembly 6, and a base 7 that are sequentially connected from top to bottom. The dual-plane positioning mechanism 14 with degrees of freedom includes a first series manipulator, a second series manipulator and a straight rod guide device 4, and the first series manipulator includes a first horizontal movement assembly 1 and a first vertical movement assembly 2 connected in series. And the first universal joint 3, the second serial manipulator comprises the second horizontal motion assembly 11, the second vertical motion assembly 12 and the second universal joint 13 connected in series, the first horizo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More