

Device for self-correcting control for multi-model RBF neural network of deep submersible rescue vehicle and method thereof
A technology of self-calibration control and neural network, which is applied in the field of deep submersible lifeboat control device and multi-mode RBF neural network self-calibration control device, which can solve problems such as system static error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention is described in more detail below in conjunction with accompanying drawing example:
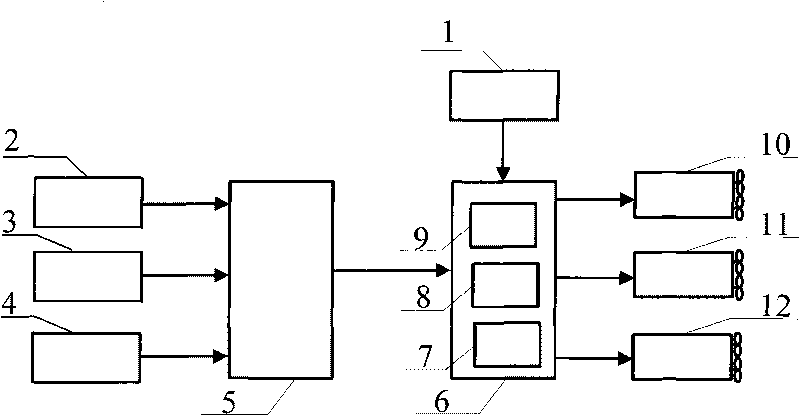
[0062] figure 1 It is a block diagram of the control system, which shows the connection relationship of the control system and the transmission relationship of information. Three high-frequency short-baseline sonars 2, 3 and 4 are connected to the DSP data processing system 5 through cables, and the DSP data processing system 5 is connected to the control system. The computer 6 is connected through a serial port, the filter 9, the thrust distribution logic 8 and the multimodal RBF neural network self-correction control algorithm 7 are embedded in the control computer 6, the gyro compass 1 is connected with the control computer 6 through a serial port, and the control computer 6 is connected through its The digital-to-analog conversion card is connected with two vertical channel propellers 10, two horizontal channel propellers 11 and two main propellers 12 respect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More