Initial matching method for use in gravimetric map matching in gravity-aided inertial navigation system
An inertial navigation system and initial matching technology, applied in the initial matching field of gravity map matching algorithm in gravity-assisted inertial navigation, to achieve the effect of overcoming failure and eliminating failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
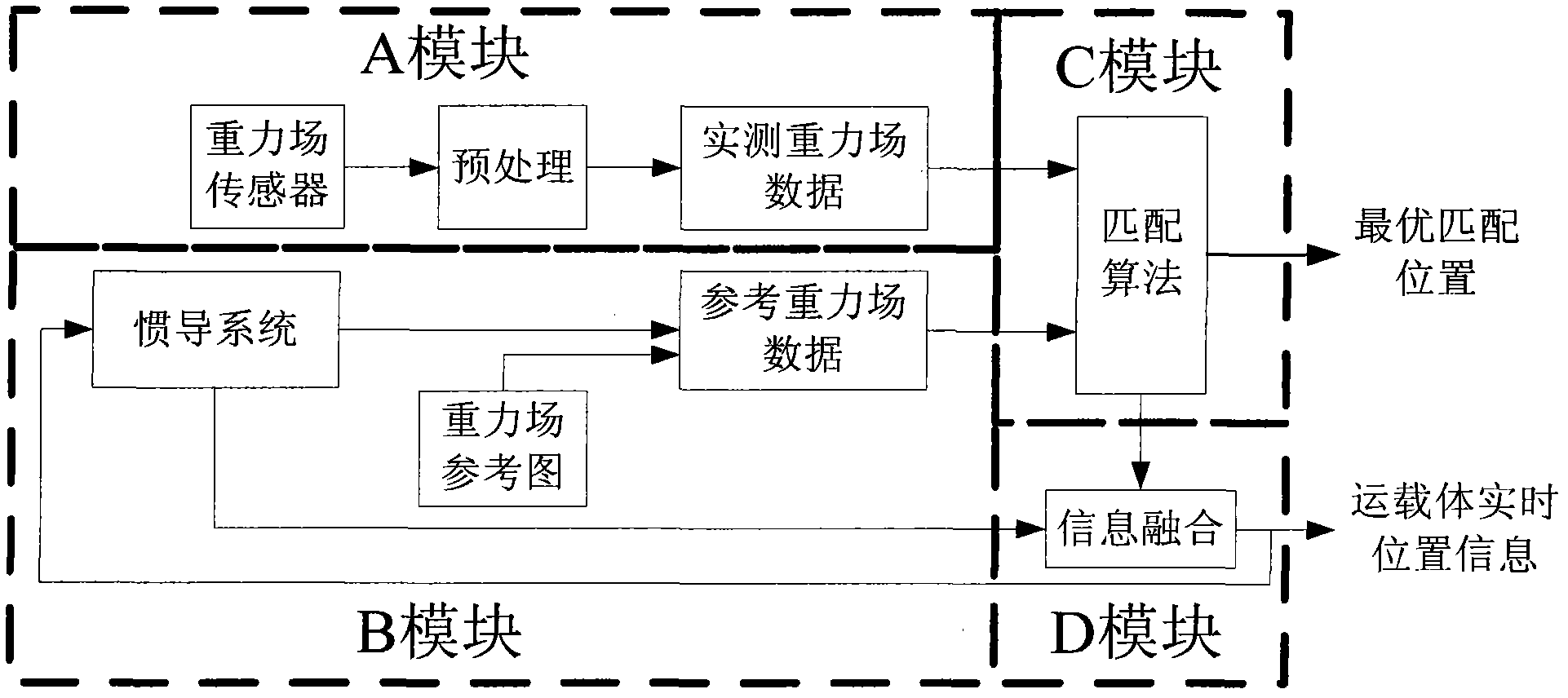
[0030] Such as figure 1 As shown, the traditional gravity-assisted inertial navigation system is generally divided into four modules: A, B, C and D. The main purpose of module A is to use the gravity field sensor carried on the carrier to measure the actual gravity field data on the carrier’s trajectory in real time; the main purpose of module B is to use the real-time data provided by the inertial navigation system on the carrier The purpose of module C is to use the matching algorithm to finally obtain the optimal position information of the carrier; the purpose of module D is to use the optimal matching position information and use information fusion technology to correct inertial data in real time. Systematic error within the guidance system.
[0031] The invention is mainly aimed at the initial alignment method of the matching algorithm in the C module, so as to improve the reliability and real-time performance of the gravity-assisted inertial navigation system.
[0032...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap