Position Matching Method for Underwater Vehicle Terrain-assisted Inertial Navigation System
A technology of inertial navigation system and underwater submersible, which is applied in the field of position matching of the terrain-aided inertial navigation system of underwater submersibles, can solve the problem of incorrect range of search area, etc., and achieve the effect of eliminating failure and overcoming failure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
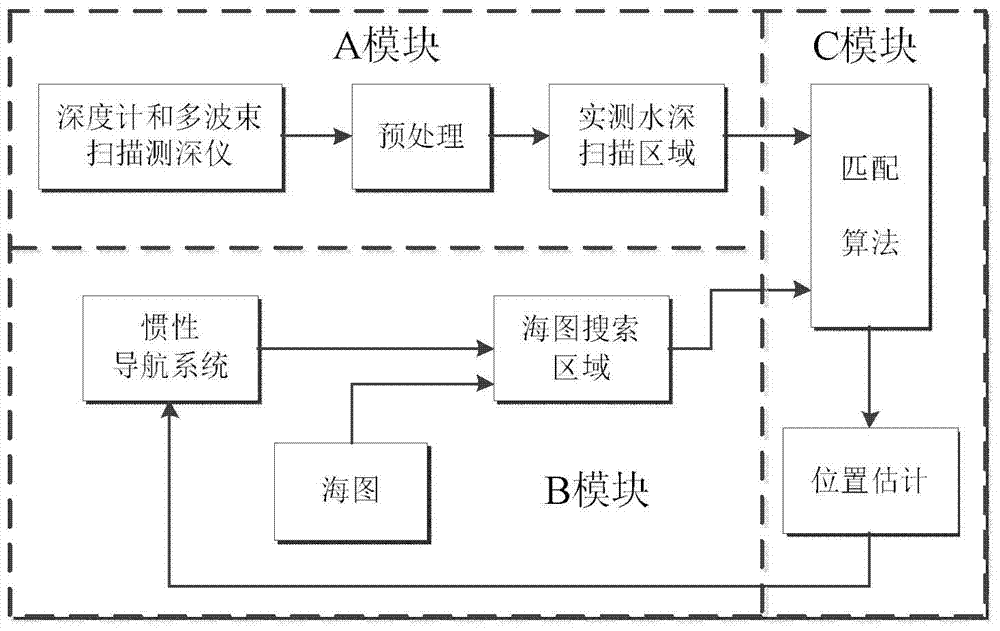
[0032] Such as figure 1 As shown, the traditional terrain-aided inertial navigation system generally includes three modules A, B and C. The main purpose of module A is to use the depth gauge and multi-beam scanning depth sounder equipped with the underwater vehicle to measure the water depth value of the navigation area of the underwater vehicle; the main purpose of module B is to use the inertial navigation system equipped with the underwater vehicle The output position information of the C module is used to calculate the distance between adjacent measurement moments, and combine the existing charts to obtain the chart search area; the purpose of the C module is to use the matching algorithm to finally obtain the position estimate of the underwater vehicle and correct the inertial navigation The po...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap