

Parallel mechanism with changeable freedom degree
A technology with variable degrees of freedom, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that the mechanism configuration and degrees of freedom cannot be changed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with specific embodiment, and with reference to accompanying drawing, the present invention will be further described:
[0024] The present invention is based on the principle of metamorphic mechanism.
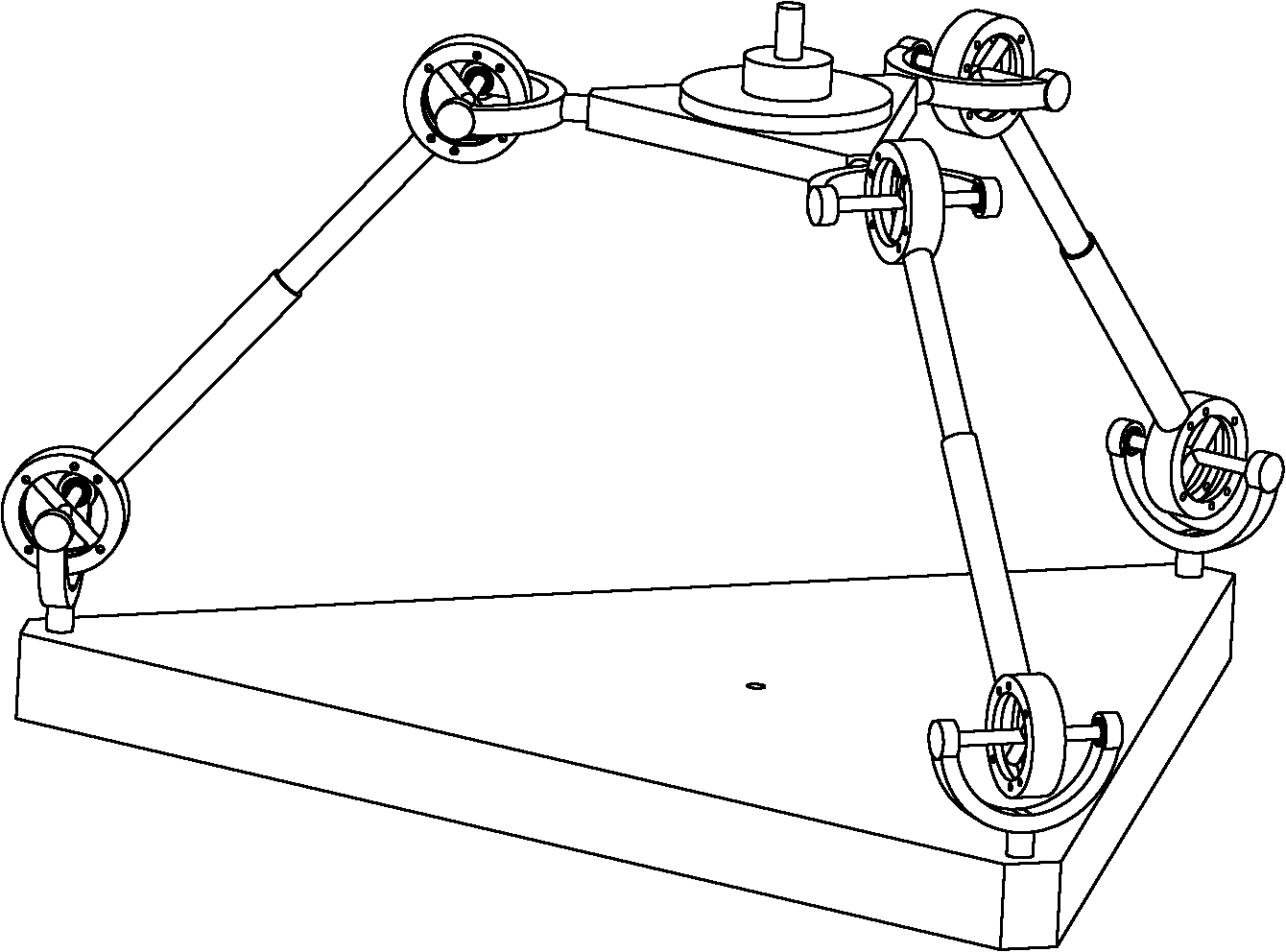
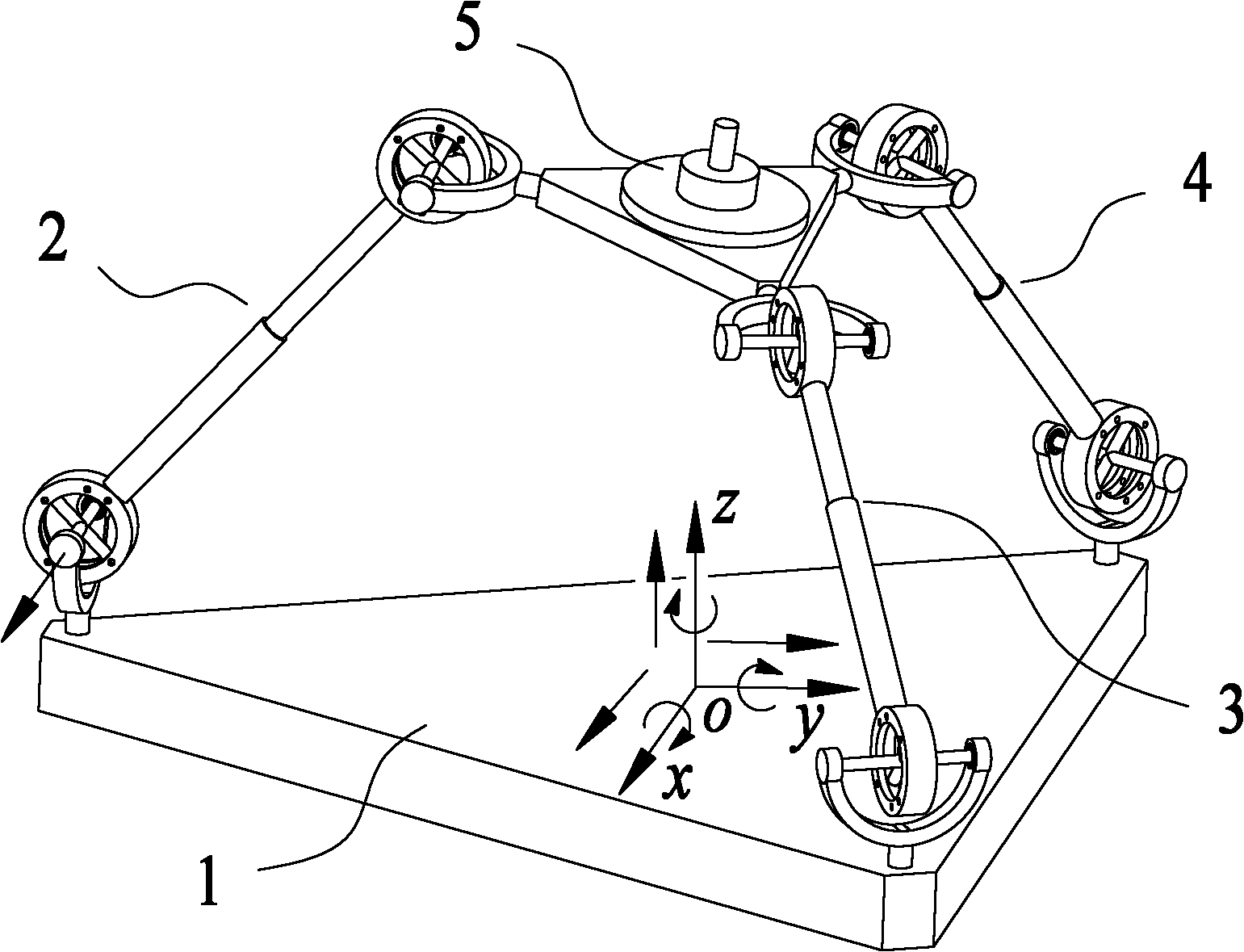
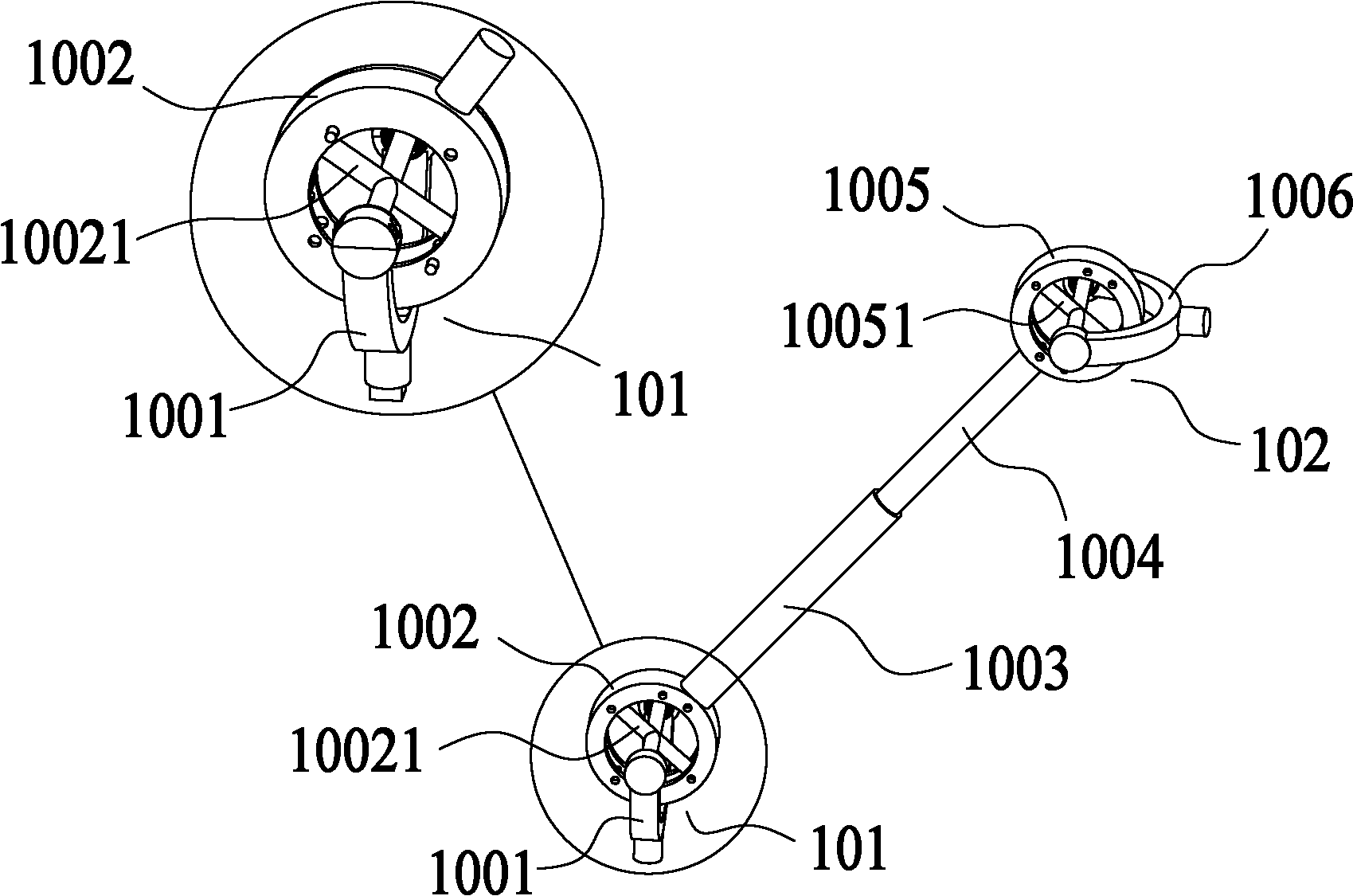
[0025] figure 1 , figure 2 Respectively, a schematic diagram of the overall structure and a schematic diagram of each component of a variable-degree-of-freedom parallel mechanism of the present invention. The present invention is made up of fixed platform 1, kinematic chain I2, kinematic chain II3, kinematic chain III4, moving platform 5, etc.
[0026] A parallel mechanism with variable degrees of freedom, which includes a fixed platform 1 and a moving platform 5 arranged above the fixed platform, and three kinematic chains (including Kinematic chain I2, kinematic chain II3 and kinematic chain III4), each kinematic chain includes a cylindrical secondary connecting rod I1003, and one end of the cylindrical secondary connecting rod I1003 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More