

Timely four-wheel drive (4WD) electric wheel automobile adaptive steering system and control method thereof
A technology for electric wheel vehicles and steering systems, which is applied to automatic steering control components, electric steering mechanisms, non-deflectable wheel steering, etc. The coordination and unification of vehicle handling stability and other issues can achieve broad application prospects, improve handling stability and driving safety, and achieve the effect of perfect integration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The invention will be further described in detail below in conjunction with the drawings.
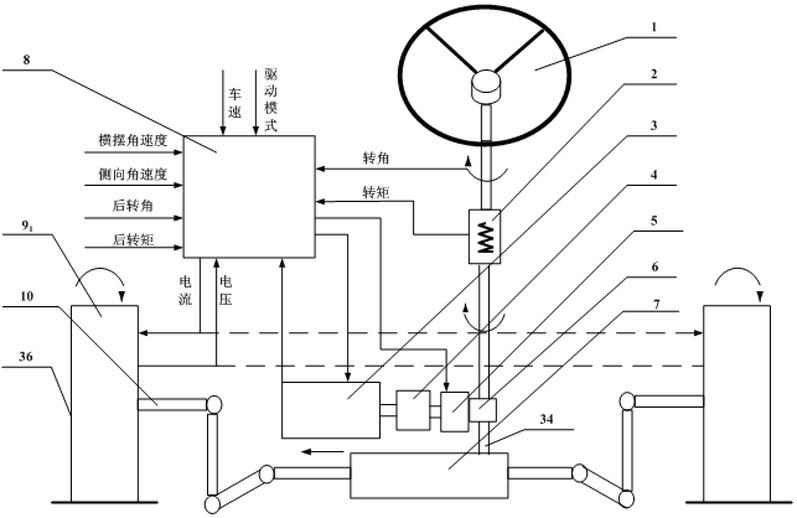
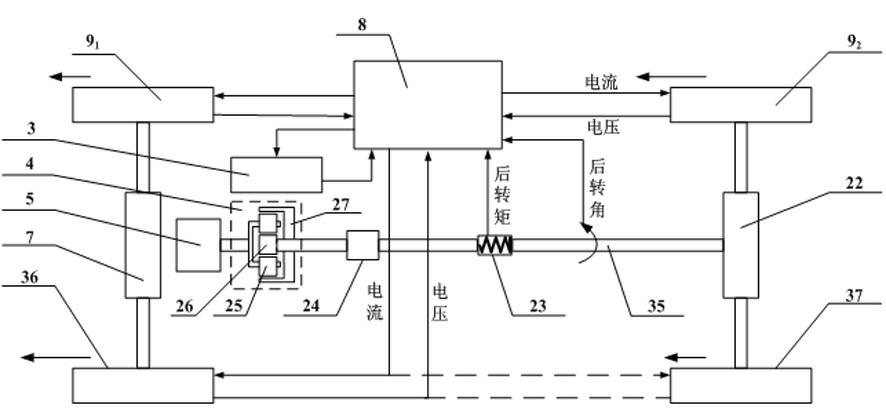
[0020] Such as figure 1 , figure 2 As shown, the adaptive steering system for a 4WD electric-wheeled vehicle in time is characterized by including a steering wheel 1, a main torque sensor 2, a steering servo motor 3, a planetary gear mechanism 4, a steering clutch 5, a rear steering first-stage pinion 6, a front Rack 7, electronic control unit ECU8, front wheel hub motor 9 1 , Rear wheel hub motor 9 2 , Front steering rocker arm 10, rear rack 22, rear torque sensor 23, main steering column 34, rear steering column 35, universal joint 24, planetary gear 25, sun gear 26, ring gear 27; main torque The sensor 2 is located under the steering wheel 1 and is connected to the steering wheel 1. The driving disc of the steering clutch 5 meshes with the rear steering pinion 6, and the steering servo motor 3 is connected to the driven disc of the steering clutch 5 through the planetary gear mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More