

Quadruped robot motion planning method for facing complex terrain
A quadruped robot and robot movement technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the lack of quadruped robot motion planning methods, and achieve the effect of safe, stable and autonomous movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
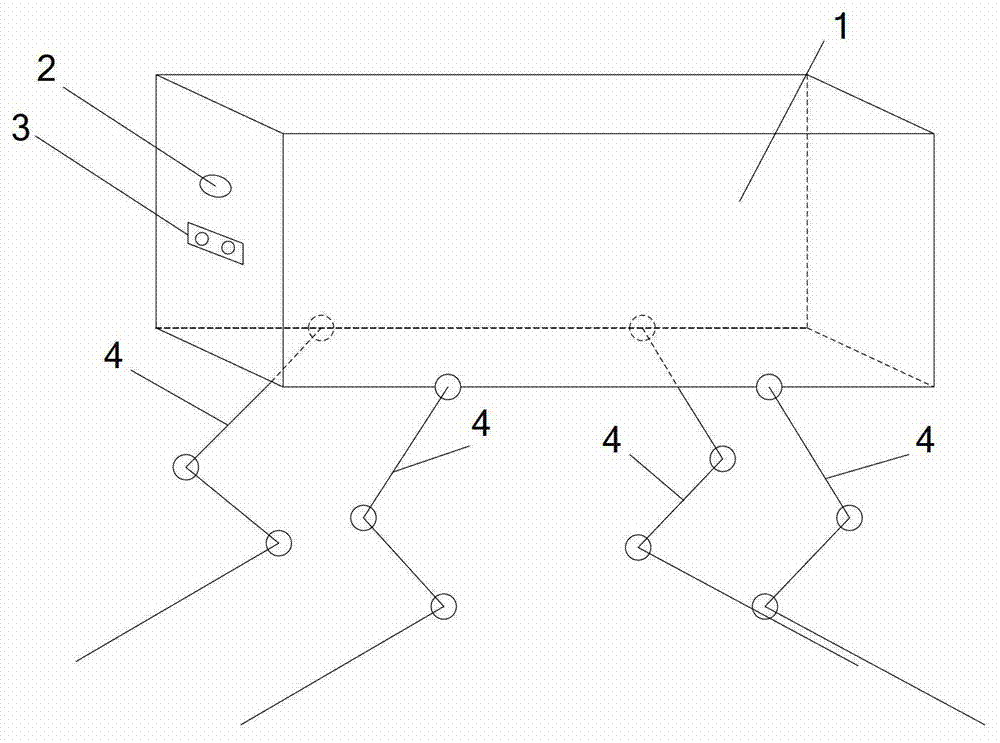
[0026] see figure 1 , which is a structural diagram of a quadruped robot used in the present invention. The quadruped robot includes: a quadruped robot body 1 , a laser sensor 2 , a stereo vision sensor 3 and four mutually independent supporting legs 4 . The laser sensor 2 is horizontally arranged on the body 1 of the quadruped robot, and is used to detect obstacles within 5 meters in front of the quadruped robot. The vision sensor 3 is placed on the quadruped robot body 1 and looks down at an an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More