

Simultaneous localization and mapping method and device
A technology for map construction and acquisition devices, which is applied in directions such as navigation through speed/acceleration measurement, can solve problems such as high equipment cost, high technical difficulty, interference, etc., and achieve cost saving, novel cost, real-time positioning and map construction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings.
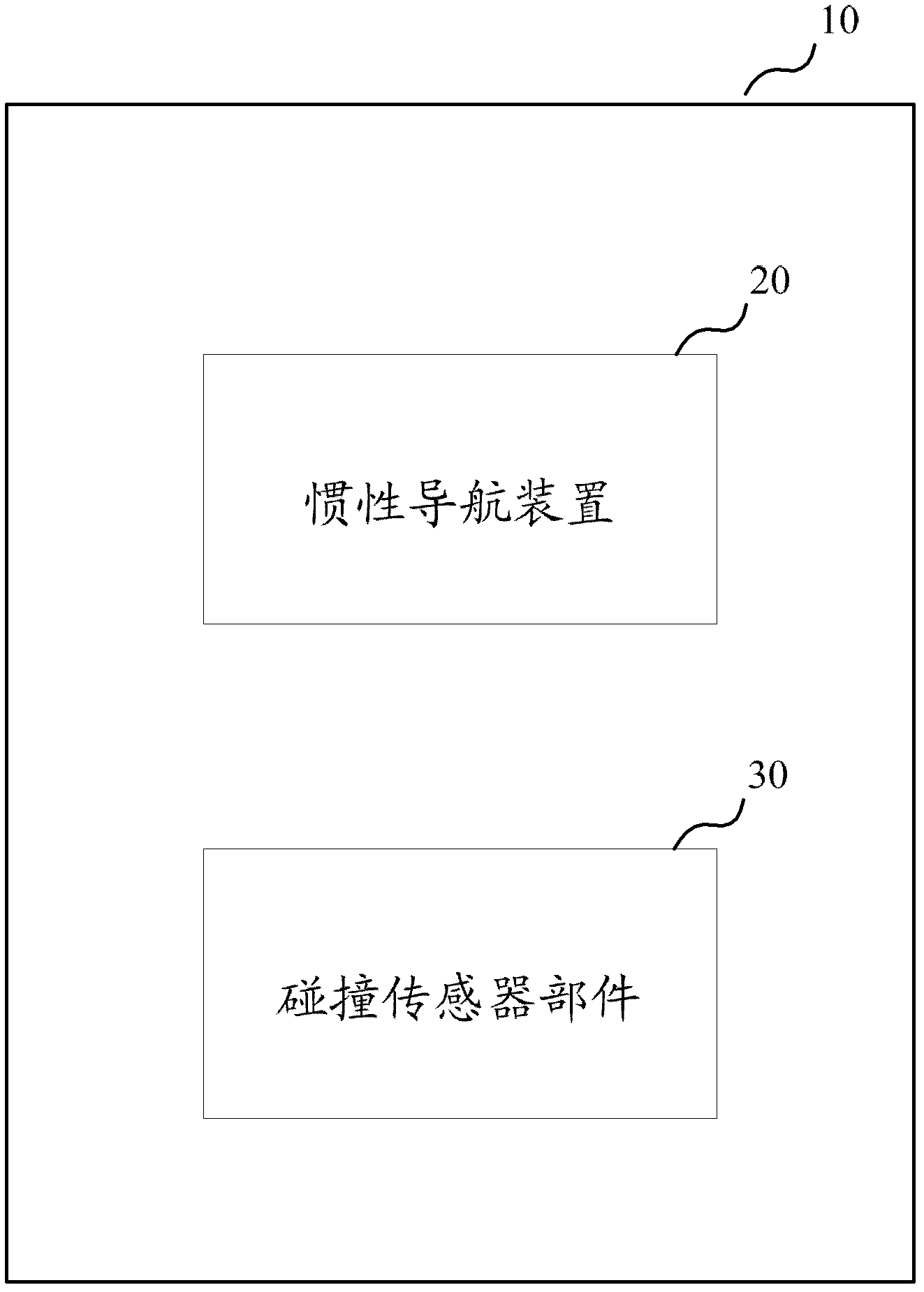
[0018] First, refer to figure 1 The real-time positioning and map construction device according to the embodiment of the present invention is described. The instant positioning and mapping means are preferably, for example, mobile electronic devices such as robots.
[0019] Such as figure 1 As shown, the real-time positioning and mapping device 10 according to the embodiment of the present invention includes an inertial navigation device 20 and a collision sensor component 30 .
[0020] Specifically, the inertial navigation device 20 includes a gyroscope, an accelerometer, etc., which are used to obtain information such as the motion position, attitude, and speed of the instant positioning and map construction device 10 . The inertial navigation device 20 uses a method of dead reckoning, that is, from the position of a known point, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More