

Automatic carrier-landing guiding method of carrier-borne unmanned aircraft
A technology of automatic landing and unmanned aerial vehicle, applied in the direction of automatic landing auxiliary device of aircraft, etc., can solve the problems of poor engineering realization, increased system complexity and instability, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing, the technical scheme of invention is described in detail:
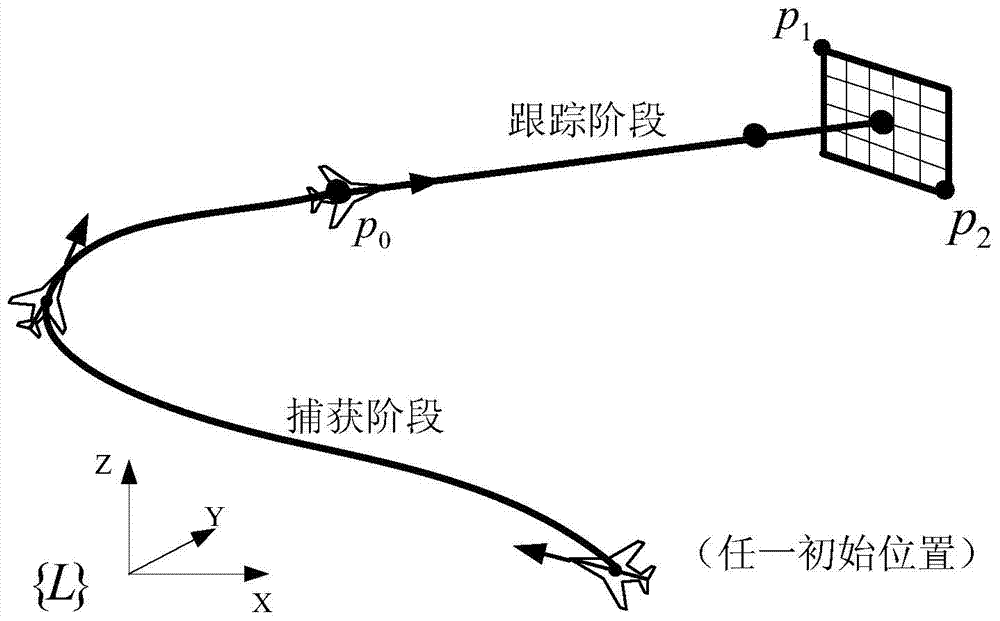
[0053] The present invention relates to a ship-borne unmanned aerial vehicle automatic landing guidance method. The recovery method of the ship-borne unmanned aerial vehicle is collision net recovery, the unmanned aerial vehicle enters the field and lands at a constant speed, and the aircraft carrier sails in a straight line. For UAVs in any flying state, the process of guiding the carrier-based UAV to the landing point is divided into the capture phase and the tracking phase according to the different stages of its approach and landing, such as figure 1 As shown, in the capture phase, since the shipboard UAV is far away from the ship, the influence of deck movement on the flight track is not considered, and the shipboard UAV is guided from any flight state to the capture point p 0 (i.e. the apex of the glideslope), using the direct line-of-sight method. determin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More