

Command generating device and command generating method
A technology of command generation and command position, applied in position/direction control, electrical program control, instruments, etc., can solve problems such as reduced work efficiency and prolonged work takt time, and achieve the effect of avoiding interference actions and avoiding interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
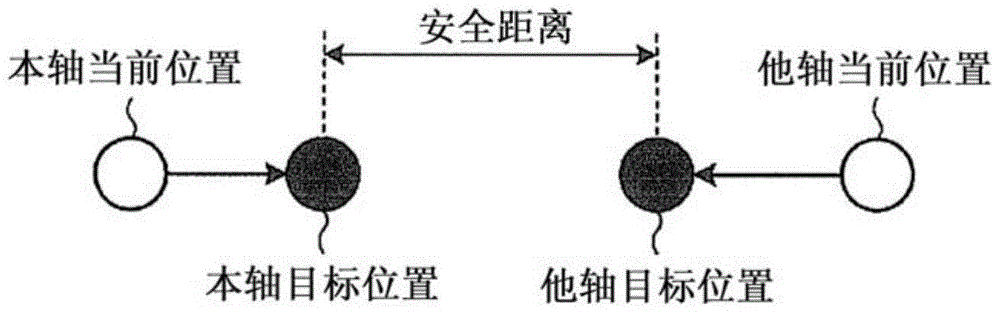
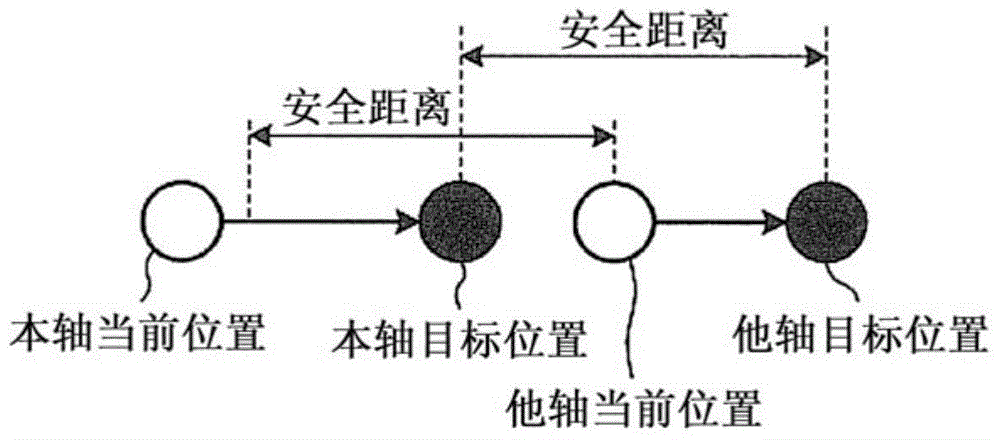
[0026] Picture 1-1 as well as Figure 1-2 It is a figure explaining the characteristic of the positioning operation performed by the command generation apparatus which concerns on Embodiment 1 of this invention. In addition, here, for simplicity of description, it is assumed that there are two movable axes (hereinafter, simply referred to as axes) included in the machine (controlled device) that is the control target of the command generation device (the own axis and the other axis).
[0027] Picture 1-1 An operation example in a case where the own axis (first movable axis) and the other axis (second movable axis) move in directions approaching each other is shown. According to the command generation device according to Embodiment 1, when the own axis and the other axes are moving in directions approaching each other, and when the distance between the target positions of both is greater than or equal to the safety distance, no interference avoidance is performed. control. ...
Embodiment approach 2
[0058] The command generation device according to Embodiment 2 can input a value not including the deceleration movement amount as the safety distance. Figure 8-1 as well as Figure 8-2 It is a figure explaining the safety distance used in Embodiment 2. As shown in the figure, even when the own axis and other axes move in a direction close to each other, or when the other axis moves in a direction away from the own axis, the offset between the axes can be used as a safety distance .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More