Shuttlecock serving device of robot
A ball-serving device and robot technology, applied in the field of robotics, can solve the problems of inability to improve the difficult skills of trainers, the difficulty of serving long and close balls, and the inability to realize the ball path and landing point, so as to reduce training difficulty and improve Response speed and adaptability to catching the ball, high degree of automation in serving the ball
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
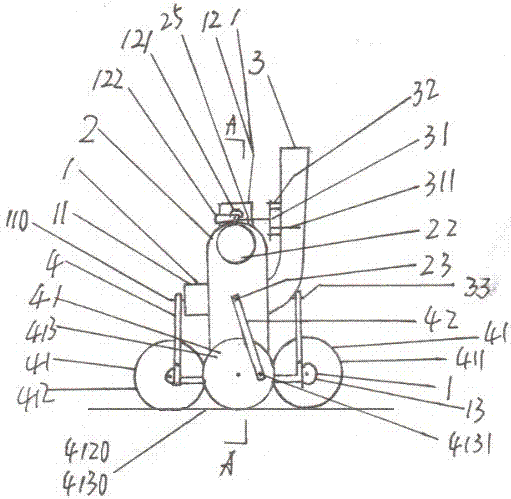
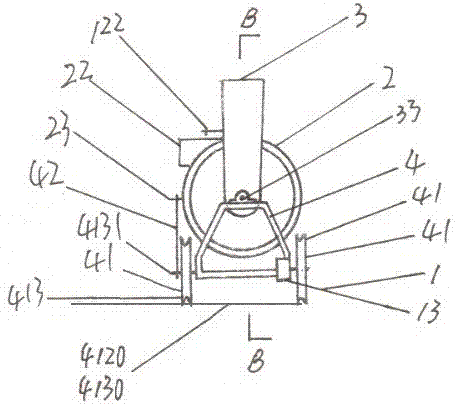
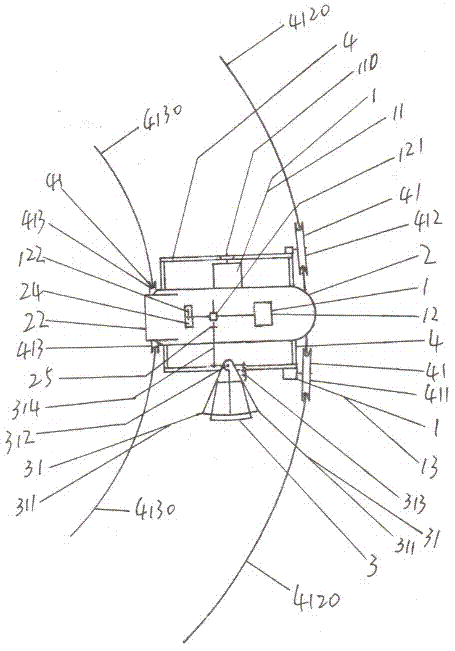
[0025] The invention is attached figure 1 , 2 , 3, the equipment consists of a motor 1, a snail housing 2, a funnel 3, a support frame 4, a sheave and a track, the snail housing 2 is bonded to the motor 1, the funnel 3 is connected to the snail housing 2 Bonding, the support frame is connected to the motor through the support shaft 110, the lower end of the funnel is connected to the support frame through the support shaft 33, the motor 1 is bonded to the support frame 4, the sheave 41 is connected to the support frame 4 through the bearing, and the sheave 41 is on the track 4120, 4130 on scroll. In order to provide power for different movements of the serve, adjust the size of the force of the serve, and simulate the movement of the sparring trainer to walk and serve the ball, there are three motors 1, the first one is a variable frequency motor 11 bonded to the snail-shaped housing 2, and its shaft 1100 is inserted vertically In the snail-shaped housing 2, its shaft end is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com