

Bionic jumping and walking mechanism
A walking mechanism and spring lock technology, applied in the field of robots, can solve the problems of not being able to adapt to the natural terrain environment, single movement or bouncing action of robots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, but the present invention is not limited to the following embodiments.
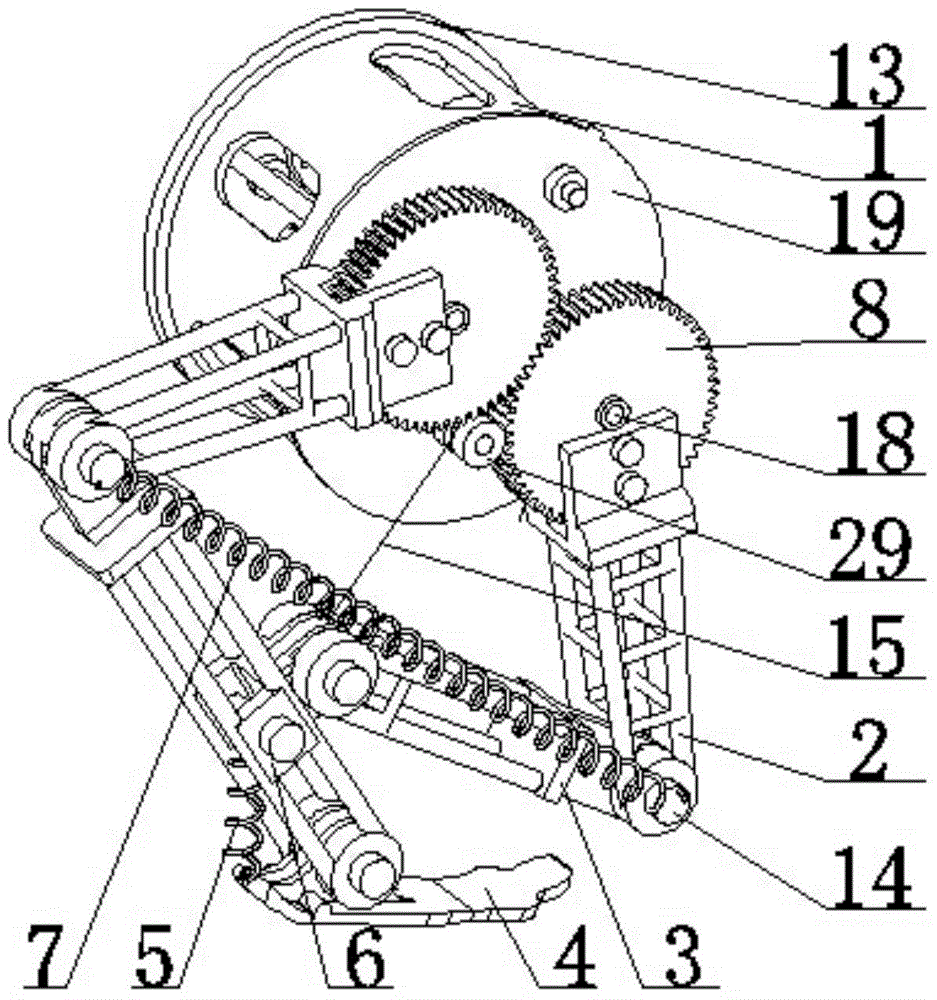
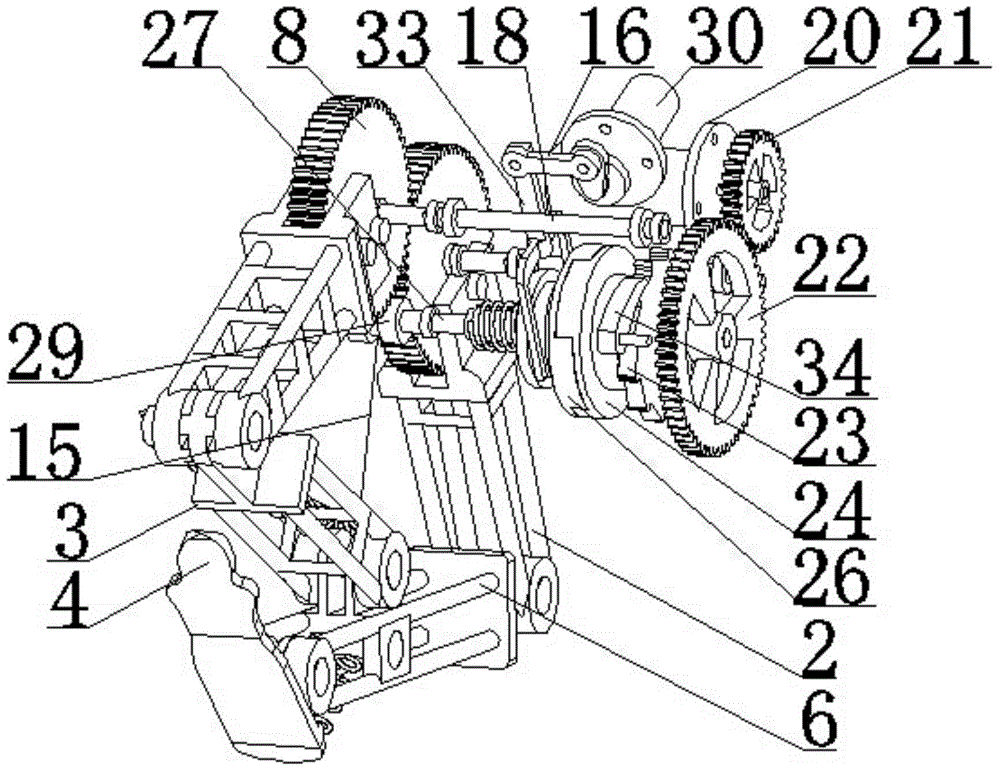
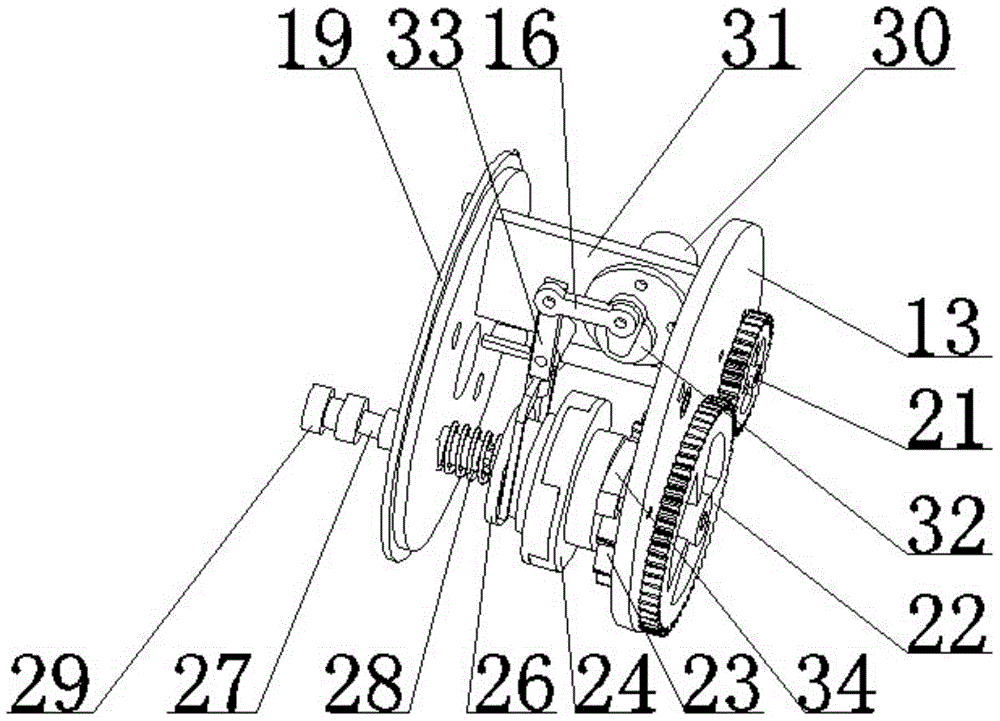
[0020] Such as figure 1 , 2 Shown in and 3, a kind of bionic bouncing and walking mechanism comprises a bouncing mechanism and a spring lock release mechanism.
[0021] The bouncing mechanism comprises a gear case housing 1, a gear case upper cover 19, a gear case lower cover 13, a hip joint motor, a crank one, a connecting rod one, a synchronous gear 8, a thigh rod 2, a calf rod one 3, a calf rod two 6, Extension spring one 7, extension spring two 5, output shaft 27, drum 29 and steel rope 15; the two ends of gear case housing 1 are respectively fixed with gear case upper cover 19 and gear case lower cover 13; gear case housing 1 passes The bearing is supported on the torso of the robot to form the hip joint; the base of the hip joint motor is fixed on the torso of the robot, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More