

Cartesian coordinate robot polishing method based on stiffness matrix
A technology of rectangular coordinates and stiffness matrix, which is applied in the field of grinding, processing and inspection of industrial robots, and can solve problems such as unpredictable system deformation or force at the end, low cost, and failure to consider robot workpiece assembly errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
[0033] A grinding method of a Cartesian robot based on a stiffness matrix, the Cartesian robot grinds
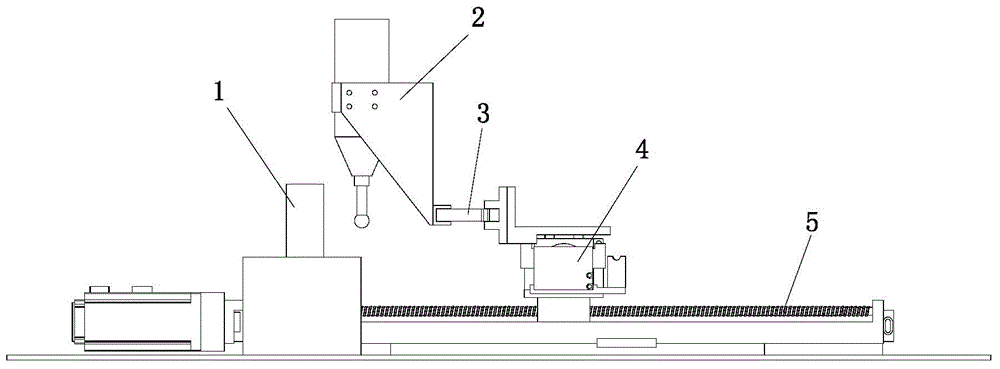
[0034] The device comprises a Cartesian robot 4, a grinding tool 2, connected to the Cartesian robot 4 and a grinding tool.
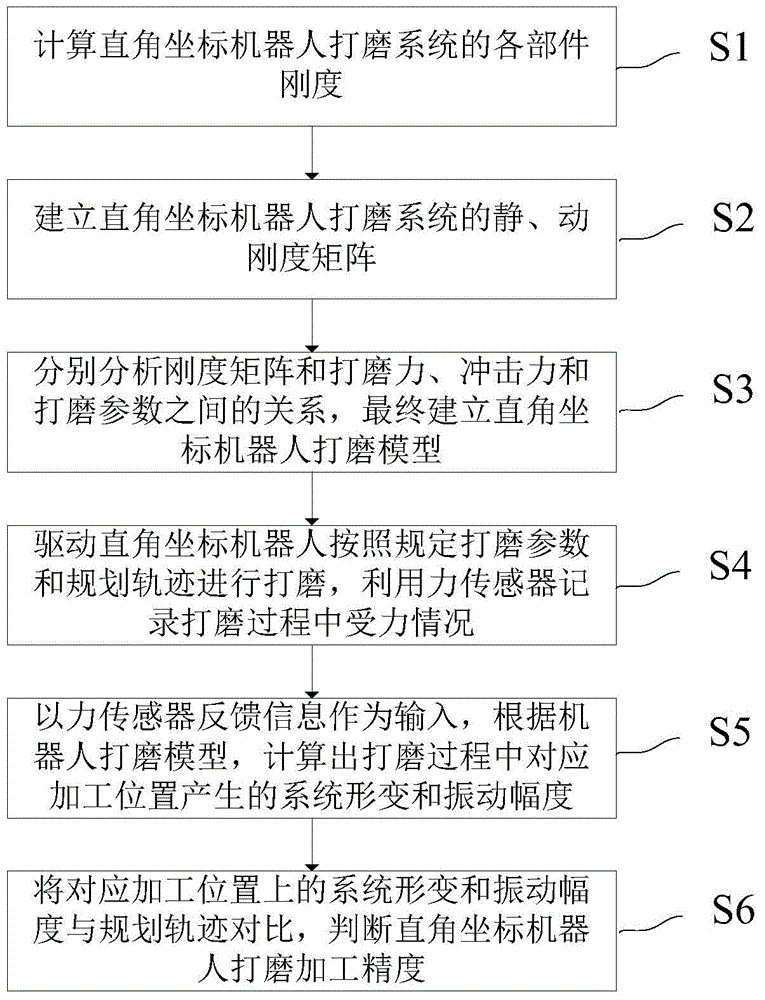
[0035] Force sensor 3 between tools 2 (see figure 1 ), including the following steps:
[0036] S1. Calculate the stiffness of each component of the Cartesian robot grinding system, including Cartesian robot 4, grinding tool 2, force sensor 3, and workpiece 1;
[0037] S2. Establish the static and dynamic stiffness matrices of the rectangular coordinate robot grinding system;
[0038] S3. Introduce the stiffness matrix ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More