

Transfer alignment time delay estimation and compensation method based on velocity plus attitude matching
A technology of time delay and compensation method, applied in the field of inertia, can solve the problems of not improving the accuracy of transfer alignment and the error estimation accuracy of inertial devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
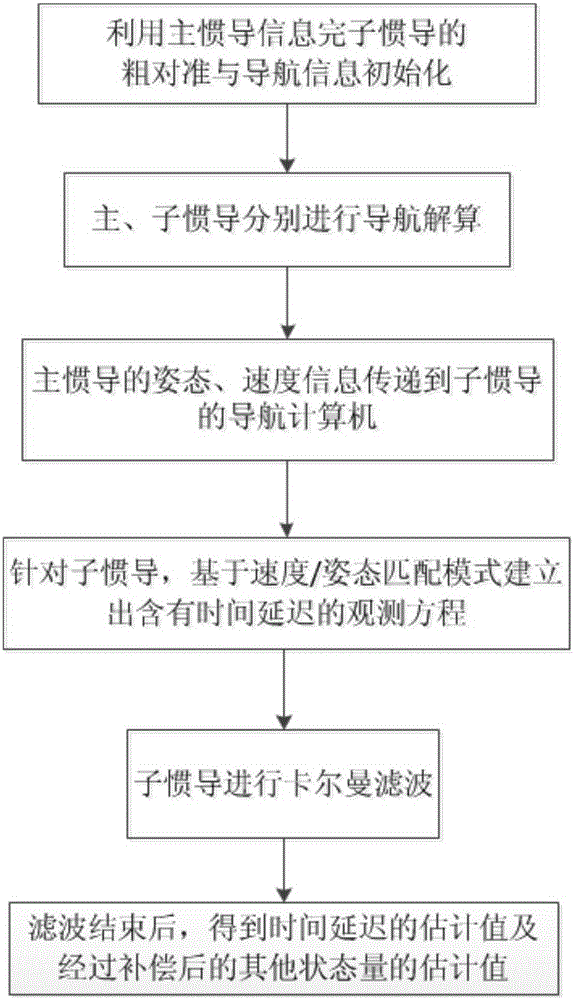
[0051] See figure 1 , a transfer alignment time delay estimation and compensation method based on speed plus attitude matching in the present invention, the specific steps of the method are as follows:
[0052] Step 1: Use the information of the main inertial navigation system that has been aligned to complete the coarse alignment of the sub-inertial navigation system and the initialization of navigation information;
[0053] Step 2: The main and sub inertial navigation systems perform navigation calculations respectively, and the speed and attitude information of the main inertial navigation are transmitted to the navigation computer of the sub inertial navigation;
[0054]Step 3: In the navigation computer of the sub-inertial navigation, the filter observation model is derived based on the commonly used speed / attitude matching mode, the observation equation including the time delay model is established, and the standard discrete Kalman filter iterative settlement is performe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More