

Intelligent path-finding method of sweeping robot
A sweeping robot and intelligent technology, applied in two-dimensional position/channel control and other directions, can solve the problems of low cleaning coverage and low efficiency of random collision sweeping robots, and achieve the effect of improving cleaning coverage and effective cleaning work.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
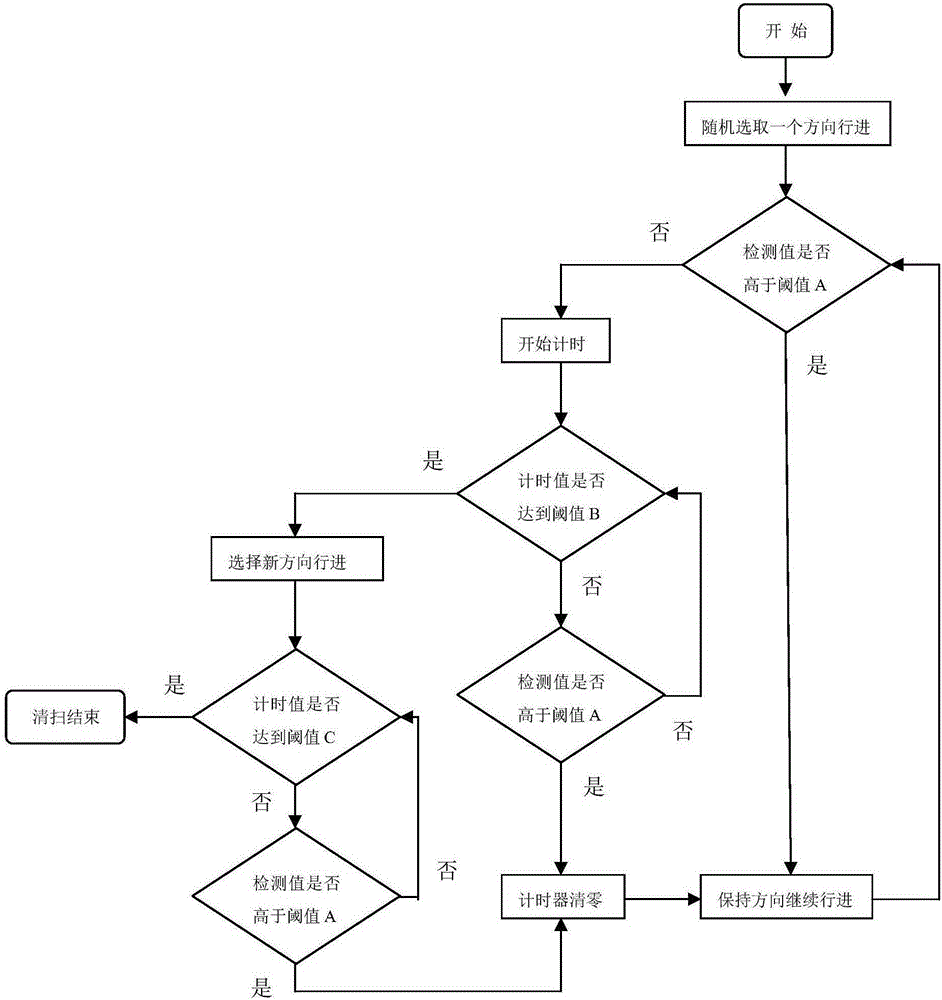
[0013] The present invention is applied to the existing random collision sweeping robot. A dust detector is installed at the dust suction port of the sweeping robot, and a control unit and a timer are added to the control module of the sweeping robot. The control unit can receive The detection value output by the dust detector is recorded and analyzed, and the driving direction of the sweeping robot is controlled according to the analysis result, thereby completing the intelligent pathfinding process.
[0014] refer to figure 1 , the specific pathfinding process is as follows:
[0015] Step 1: The sweeping robot is started, the timer is reset, and the sweeping robot randomly selects a direction at the initial position to travel. During the travel process, the dust detector keeps detecting the current dust concentration in real time, and continuously sends the detection value to the control unit in real time;
[0016] Step 2: The sweeping robot keeps moving in the direction, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More