

Spline curve interpolation parameter calculation method
A spline curve interpolation and parameter calculation technology, applied in computer control, instruments, simulators, etc., can solve problems such as unfavorable real-time interpolation, large rounding errors, and the second-order derivative of calculation curves.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The specific implementation manner of the present invention will be described in detail in conjunction with the technical scheme and the accompanying drawings.
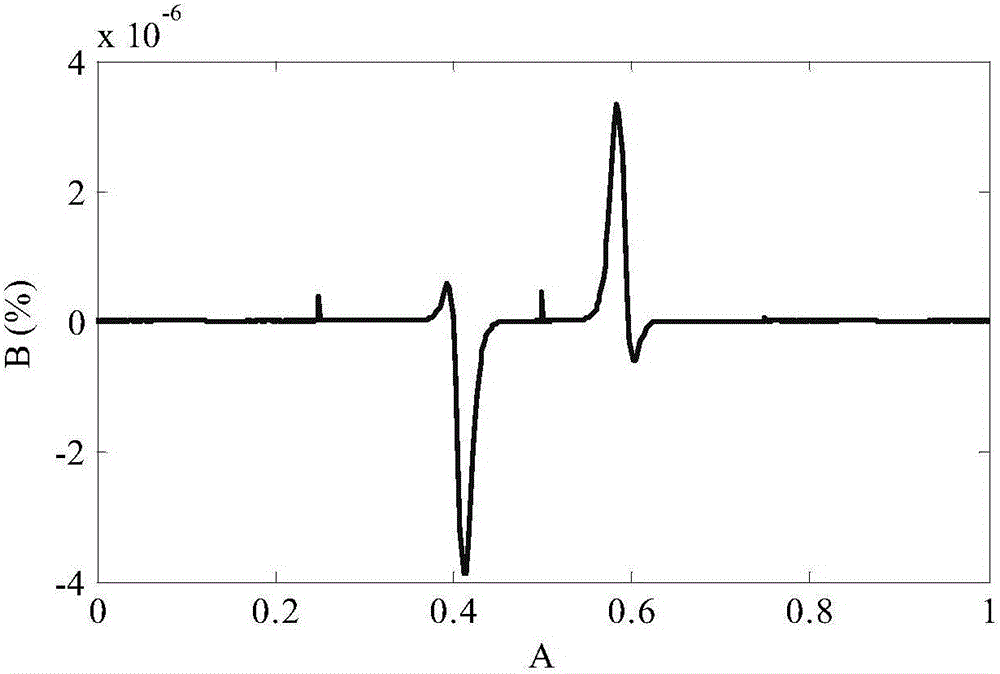
[0047] In the process of parametric spline curve interpolation, since the curve parameters have a nonlinear correspondence with the arc length, if the interpolation parameters are not calculated using a time-consuming and uncertain iterative method, it is very easy to cause a deviation between the actual feed speed and the ideal speed, that is, Speed fluctuations affect the surface quality of parts. Accordingly, a calculation method of spline curve interpolation parameters is invented.
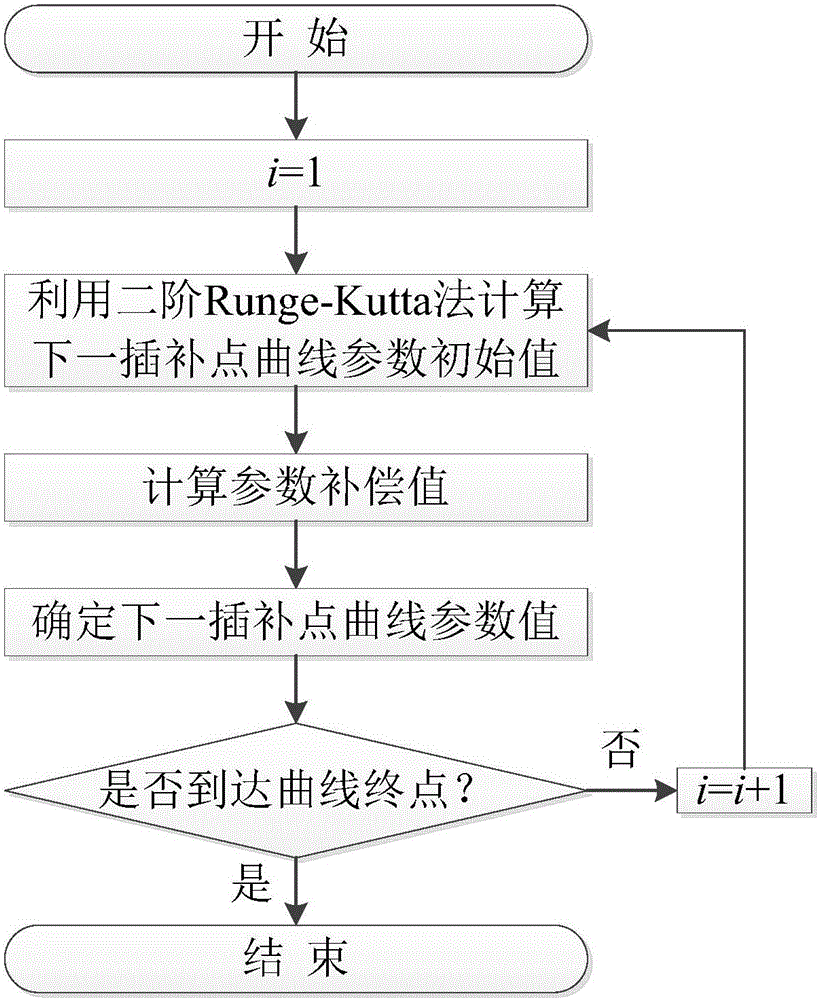
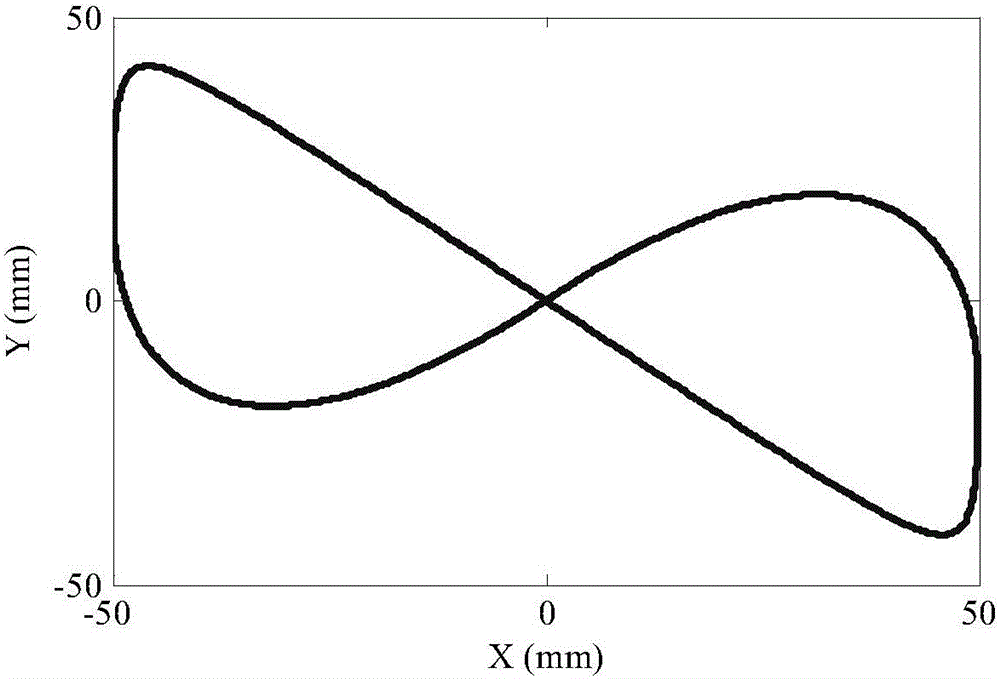
[0048] Taking the interpolation of non-uniform rational B-spline curves in the shape of "inverted pointed eight" as an example, the implementation process of the present invention is described in detail. For the overall process, see the attached figure 1 . The parameters of the "inverted eight" non-uniform rational B-spline...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More