

Robot system having robot operated in synchronization with bending machine
A robotic system and bending processing technology, applied in the field of robotic systems, can solve problems affecting processing quality, workpiece bending, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
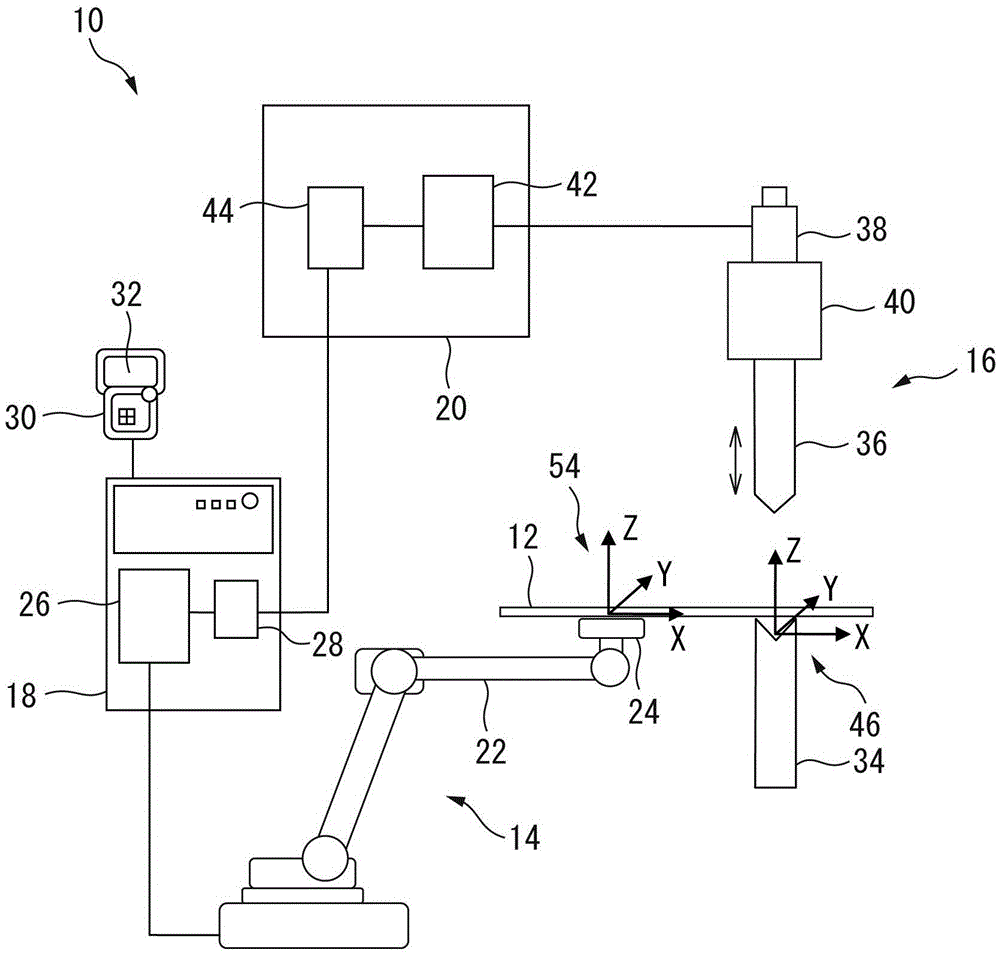
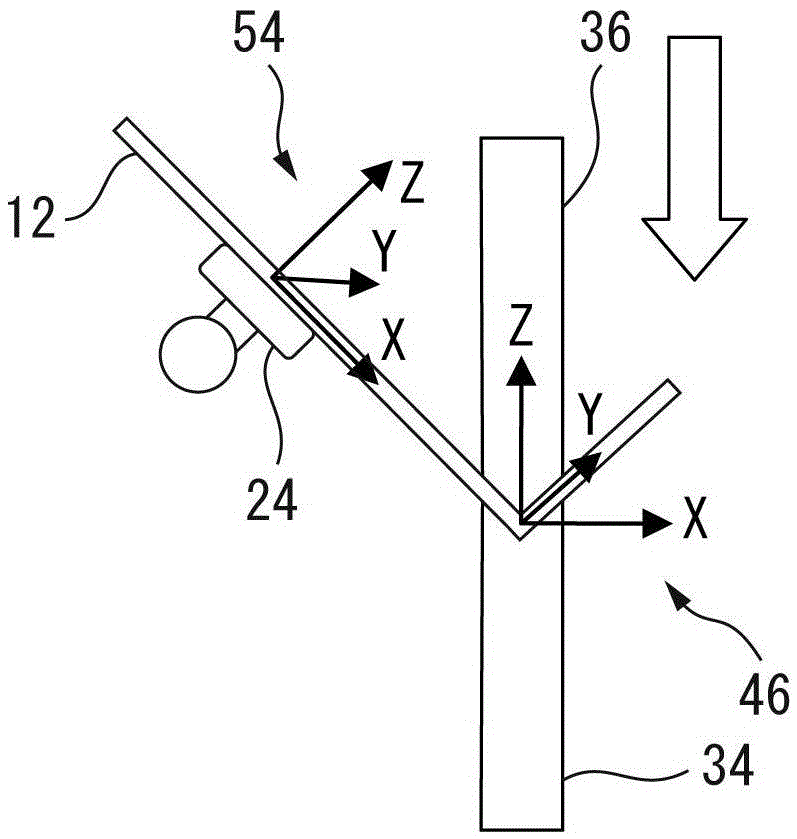
[0041] First, if figure 1 or image 3 As shown, the user coordinate system 46 for the rotation axis (rotation center line) of the bending operation in the predetermined bending process is set. For example, the user coordinate system 46 can be set by the operator inputting the position and angle of each axis of the robot 14 to the teaching operation panel 30 , Figure 4 This input example (screen 32 of the teaching operation panel 30) is shown. In addition, in figure 1 In our example, the user coordinate system 46 is set so that its Y axis is aligned with the edge of the die 34 (in figure 1 The center extends vertically with the paper surface).
[0042] Next, if Figure 5 As shown, in the teaching program 48 of the robot 14, the processing start position P[1] and the motion form are defined, the bending processing command (BEND_START) is added, and the rotation angle (θ) and the rotation around the bending processing (bending motion) are specified. The angular velocity (h...
no. 2 example
[0048] First, if figure 1 or Figure 7 As shown, the user coordinate system 46 for the rotation axis (rotation center line) of the bending operation in the predetermined bending process is set. Like the first embodiment, for example, the user coordinate system 46 can be set by the operator inputting the position and angle of each axis of the robot 14 to the teaching pendant 30 . Figure 4 This input example (screen 32 of the teaching operation panel 30) is shown. In addition, in figure 1 In our example, the user coordinate system 46 is set so that its Y axis is aligned with the edge of the die 34 (in figure 1 The center extends vertically with the paper surface).
[0049] Next, if Figure 8 As shown, in the teaching program 56 of the robot 14, the rotation angle (θ) of the bending process (bending action), the angular velocity (here, 90 deg / sec) of the command line 50 around the rotation axis, and the rotation angle of the user coordinate system 46 are specified. The rad...
no. 3 example
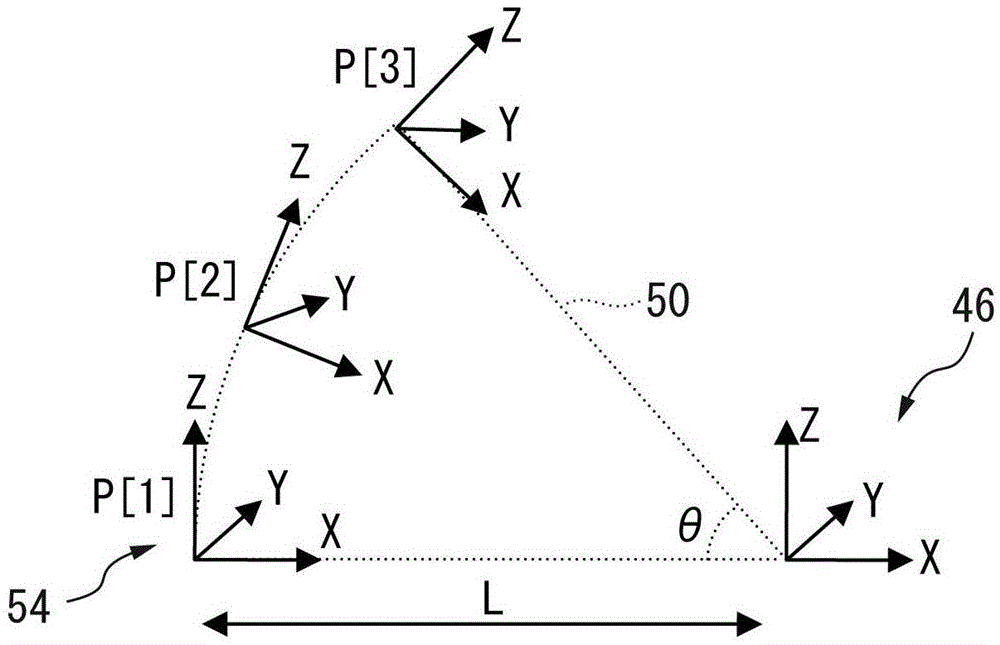
[0056] First, if Figure 8 As shown, in the teaching program 56 of the robot 14, the rotation angle (θ) of the bending process (bending action), the angular velocity (here, 90 deg / sec) of the command line 50 around the rotation axis, and the X of the user coordinate system 46 are specified. The radius (L) of the bending process in the axial direction and the rotation angle around the Z axis of the user coordinate system 46 Here, the machining start position P[1] refers to the position of the workpiece 12 held by the robot 14, as in the first embodiment. Teach in the robot teach program 48 .
[0057] Through the above processing, the definition Figure 7 A user coordinate system 46 for the axis of rotation (center line of rotation) of the predetermined bending process is shown. In the teaching program 56, the processing start position P[1] and the motion form are further defined and a bending processing command (BEND_START) is added, thereby generating Figure 7The interna...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More