

Unmanned plane and landing method thereof
A UAV, flight attitude technology, applied in the direction of unmanned aerial vehicle, motor vehicle, chassis, etc., can solve the problems of complex and changeable landing environment, uneven landing ground, accidental rollover of UAV, etc. The effect of the risk of a flight accident
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
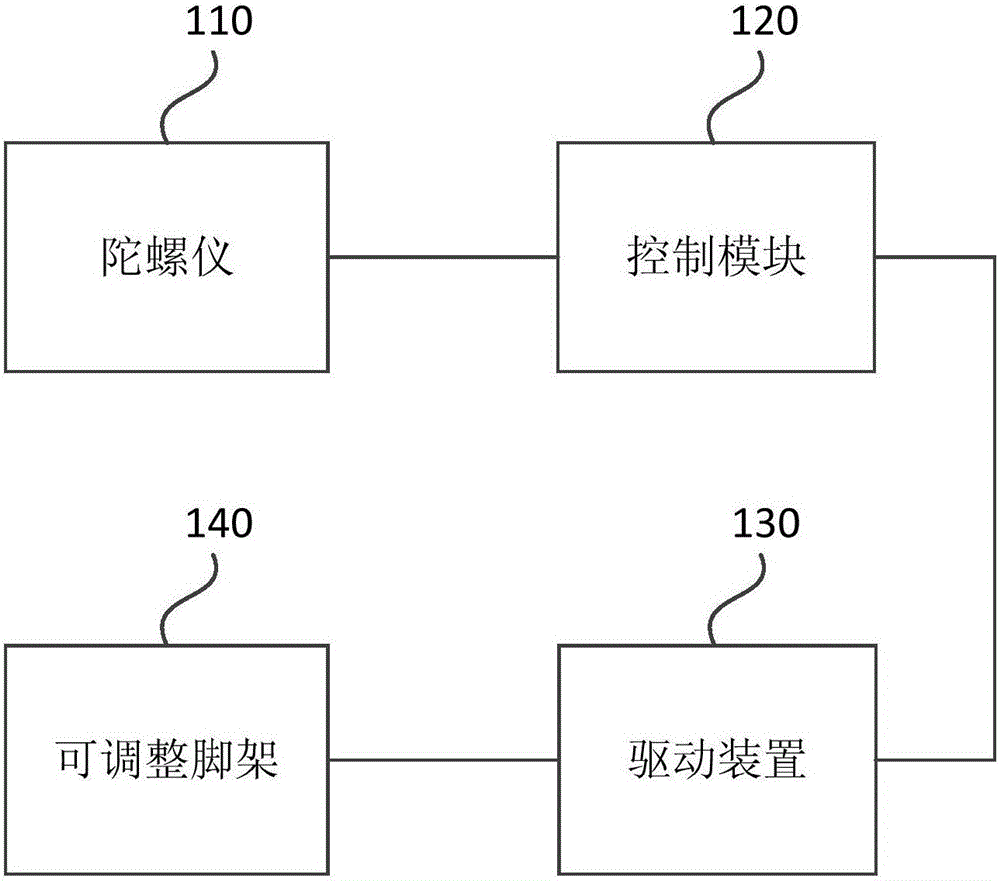
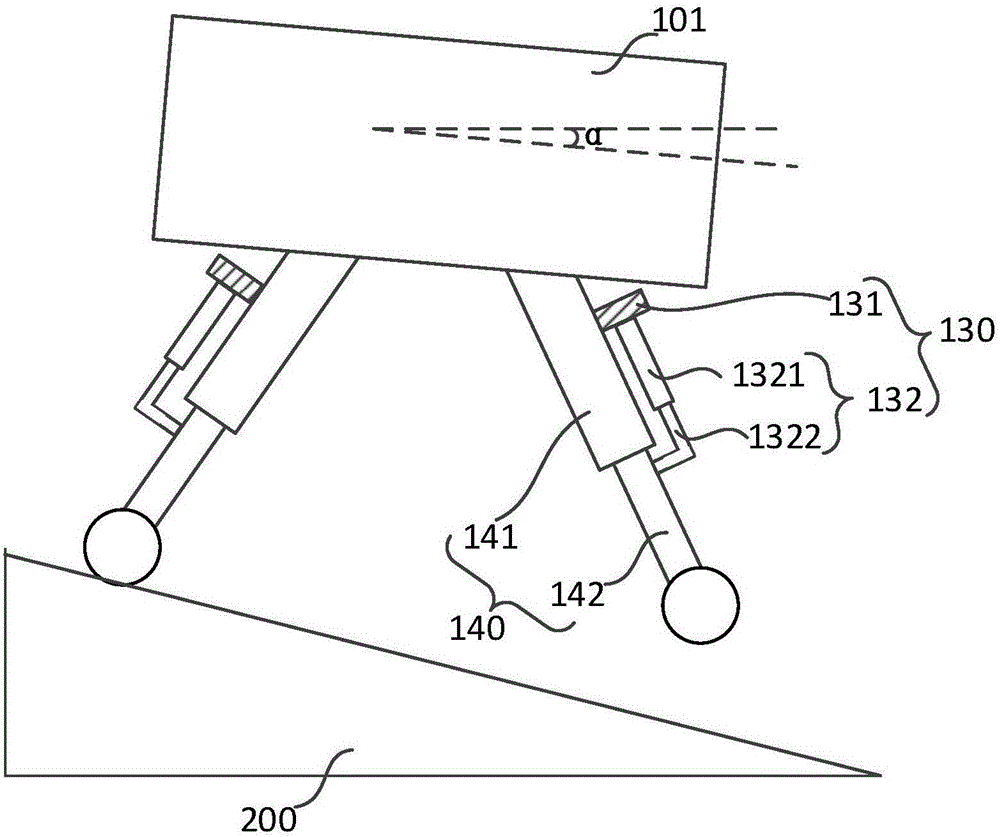
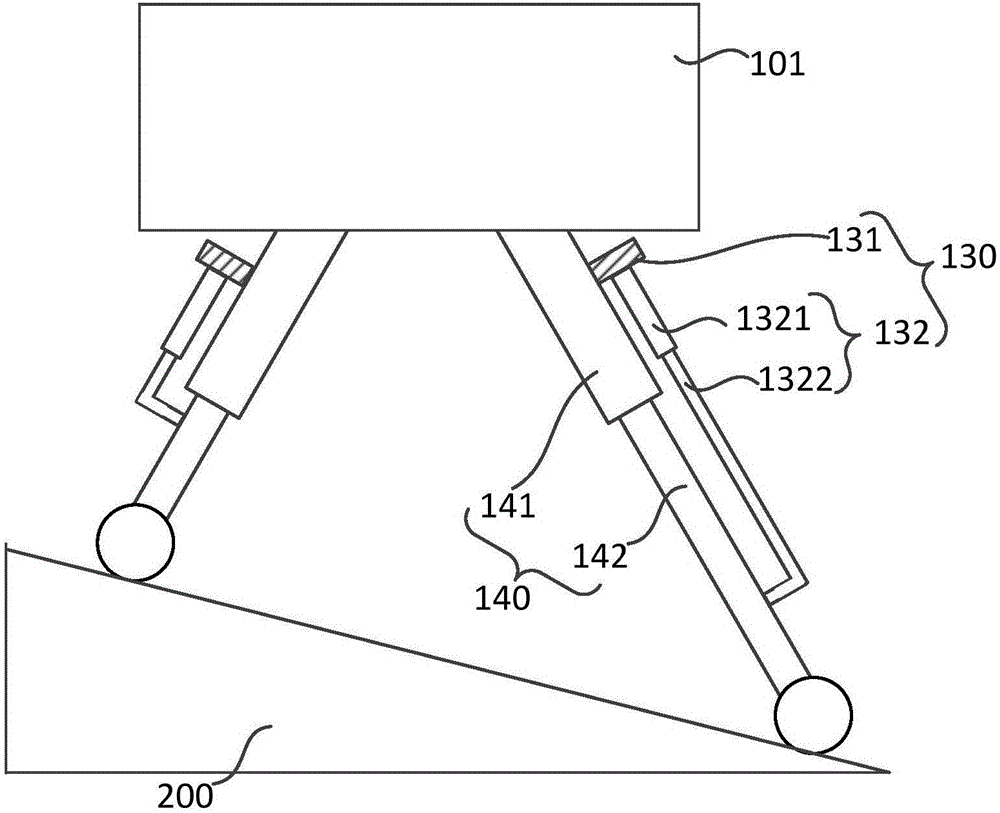
[0030] figure 1 It is a structural block diagram of an unmanned aerial vehicle provided by Embodiment 1 of the present invention. see figure 1 , the UAV includes: a gyroscope 110 , a control module 120 , a driving device 130 , and at least two adjustable legs 140 . Wherein, the gyroscope 110 is electrically connected with the control module 120 for collecting the flight attitude signal of the drone, and sends the flight attitude signal to the control module 120; the control module 120 is electrically connected with the driving device 130 for obtaining The flight attitude signal of the UAV generates a control signal based on the flight attitude signal, and sends the control signal to the driving device 130; the driving device 130 is connected with the adjustable tripod 140, and is used to Adjust the adjustable tripod 140 to make the drone land smoothly. The adjustable stand 140 may be a stand capable of changing its own length by stretching along the extending direction of t...
Embodiment 2
[0044] image 3 It is a flow chart of a landing method provided by Embodiment 2 of the present invention. This landing method is applicable to the UAV provided by the embodiment of the present invention. The landing method includes:
[0045] S210, the gyroscope collects the flight attitude signal of the drone, and sends the flight attitude signal to the control module.
[0046] S220, the control module acquires a flight attitude signal of the drone, generates a control signal based on the flight attitude signal, and sends the control signal to the driving device.
[0047] S230, the driving device adjusts the adjustable tripod according to the control signal, so that the UAV lands smoothly.
[0048] The technical solution of the embodiment of the present invention uses the control module to collect the flight attitude signal of the drone based on the gyroscope to generate a control signal, and the driving device adjusts the adjustable tripod according to the control signal t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More