

Multi-link double-spring rectilinear flat clamping and adaptive robot finger device
A robot finger, self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of small grasping range, inability to achieve linear and parallel clamping, large motion dead zone of multi-link mechanism, etc., to achieve grasping wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
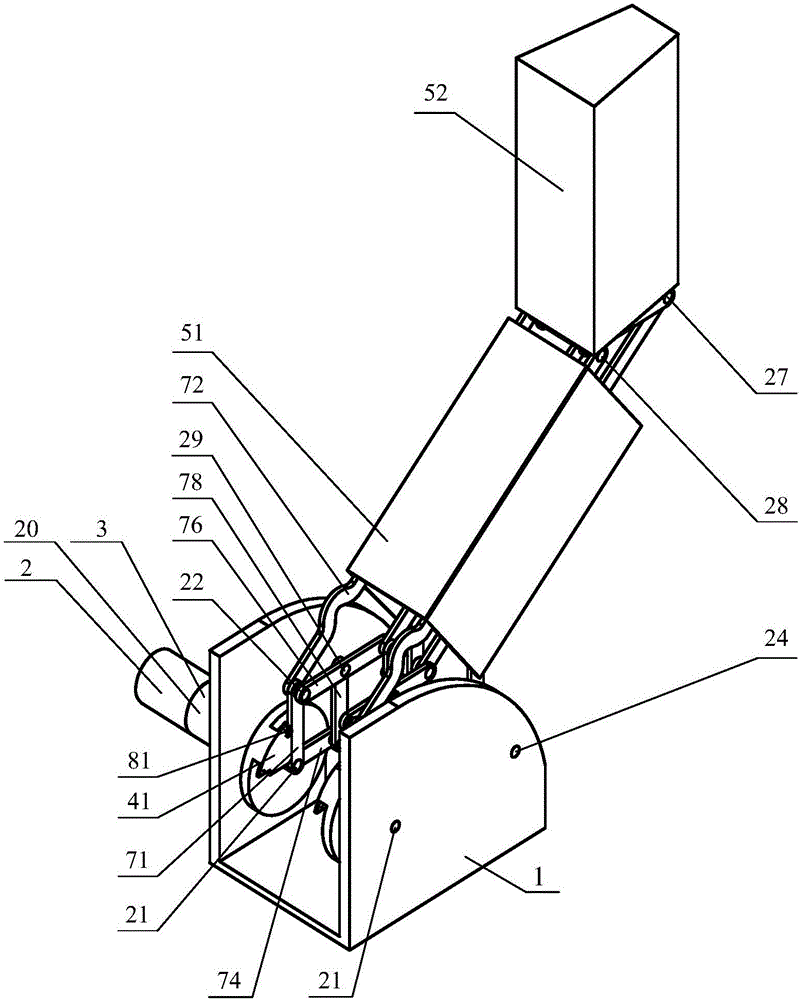
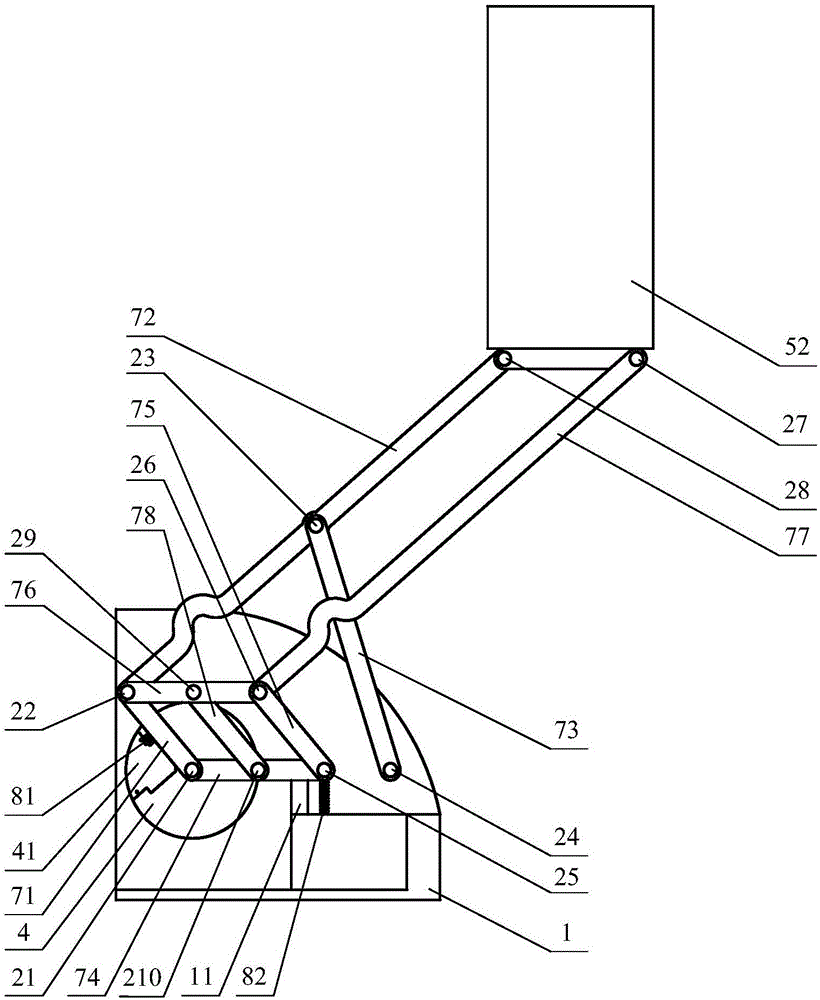
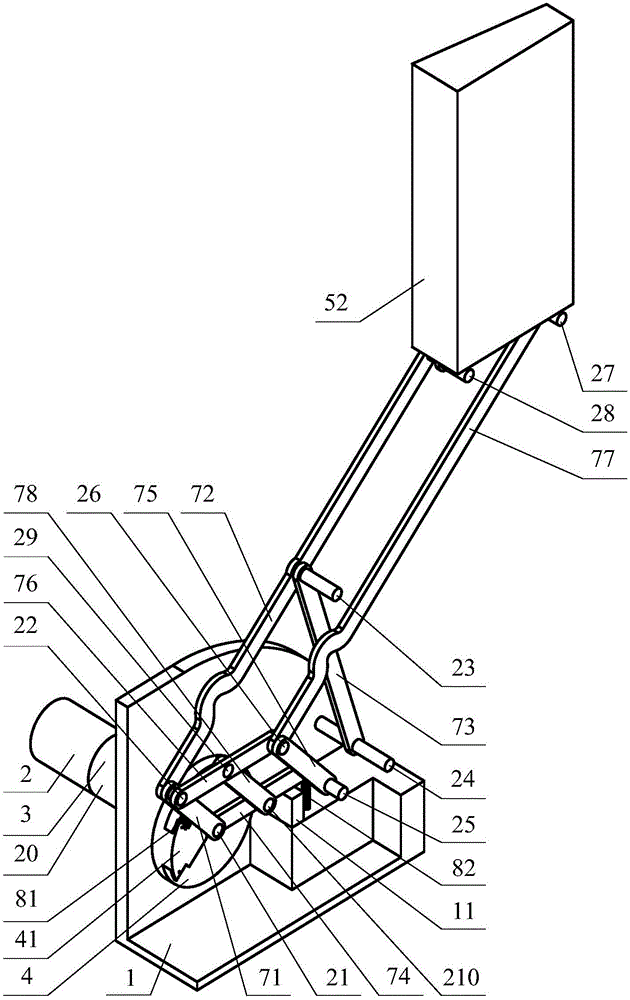
[0032] A kind of embodiment of the self-adaptive robotic finger device of the multi-link double-spring part straight-line flat folder that the present invention designs, as Figure 1 to Figure 4As shown, it includes a base 1, a first finger segment 51, a second finger segment 52, a joint shaft 28, a motor 2, a transmission mechanism 3, a first connecting rod 71, a second connecting rod 72, a third connecting rod 73, a Four connecting rods 74, fifth connecting rod 75, sixth connecting rod 76, seventh connecting rod 77, first shaft 21, second shaft 22, third shaft 23, fourth shaft 24, fifth shaft 25, sixth shaft 26, the seventh shaft 27, the first spring 81, the second spring 82, the limit block 11 and the bump dial 4; the motor 2 is fixedly connected to the base 1; the transmission mechanism 3 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More