

Robot relocation method and device
A robot and relocation technology, applied in the field of robotics, can solve the problems of robot task termination, positioning errors, and increased mapping costs, and achieve the effect of avoiding increased mapping costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
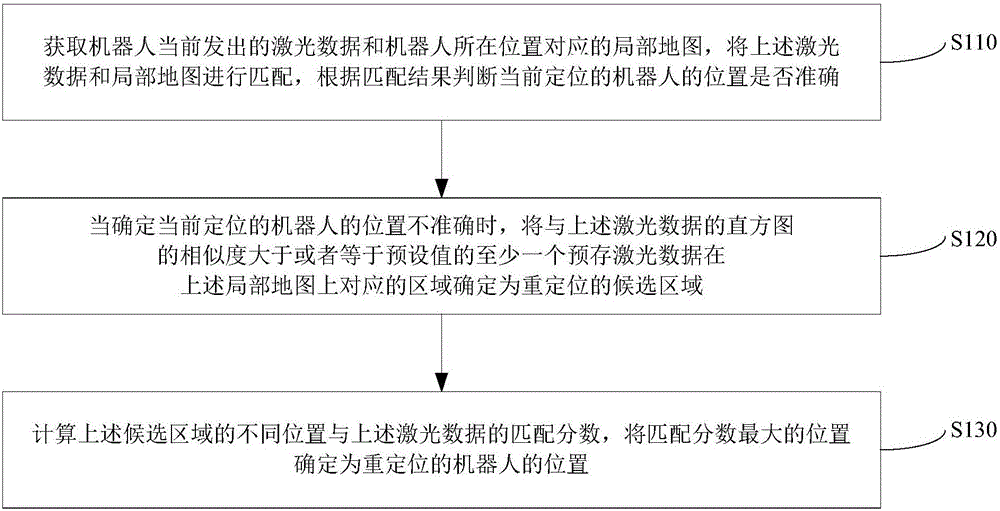
[0062] The embodiment of the present invention provides a method for robot relocation. When the position of the robot located in the map constructed by SLAM is wrong, the method provided by the embodiment of the present invention is used to relocate the robot without rebuilding the map, avoiding The situation where the cost of mapping increases due to re-mapping and the robot terminates the task it is performing.
[0063] When the robot is performing a certain task or moving, the laser ranging system on the robot will continuously emit laser light, and the emitted laser light will be reflected back when it encounters an obstacle, and the reflected signal can be used to determine whether there is an obstacle. In this way, the obstacle avoidance and path planning of the robot can be realized.
[0064] Such as figure 1 As shown, the robot relocation method provided by the embodiment of the present invention specifically includes steps S110-S130.
[0065] S110, acquiring laser ...
Embodiment 2
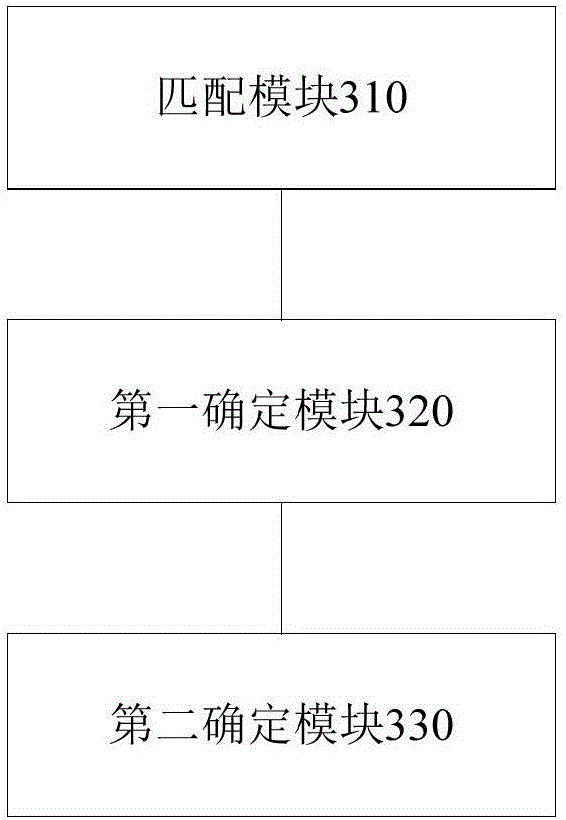
[0107] An embodiment of the present invention provides a robot relocation device, such as image 3As shown, the device provided by the embodiment of the present invention includes a matching module 310, a first determination module 320, and a second determination module 330;
[0108] The above-mentioned matching module 310 is used to obtain the laser data currently emitted by the robot and the local map corresponding to the location of the robot, match the above-mentioned laser data and the local map, and judge whether the position of the currently positioned robot is correct according to the matching result;
[0109] The above-mentioned first determination module 320 is configured to, when it is determined that the position of the currently positioned robot is inaccurate, at least one pre-stored laser data whose similarity with the histogram of laser data is greater than or equal to a preset value corresponds to the above-mentioned local map. The region is determined as a can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More