

Anti-collision management of overlapping robotic movements
A robot and anti-collision technology, applied in the direction of instruments, manipulators, non-electric variable control, etc., can solve the problems of reducing efficiency, not being able to produce, and limiting the synchronization ability of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
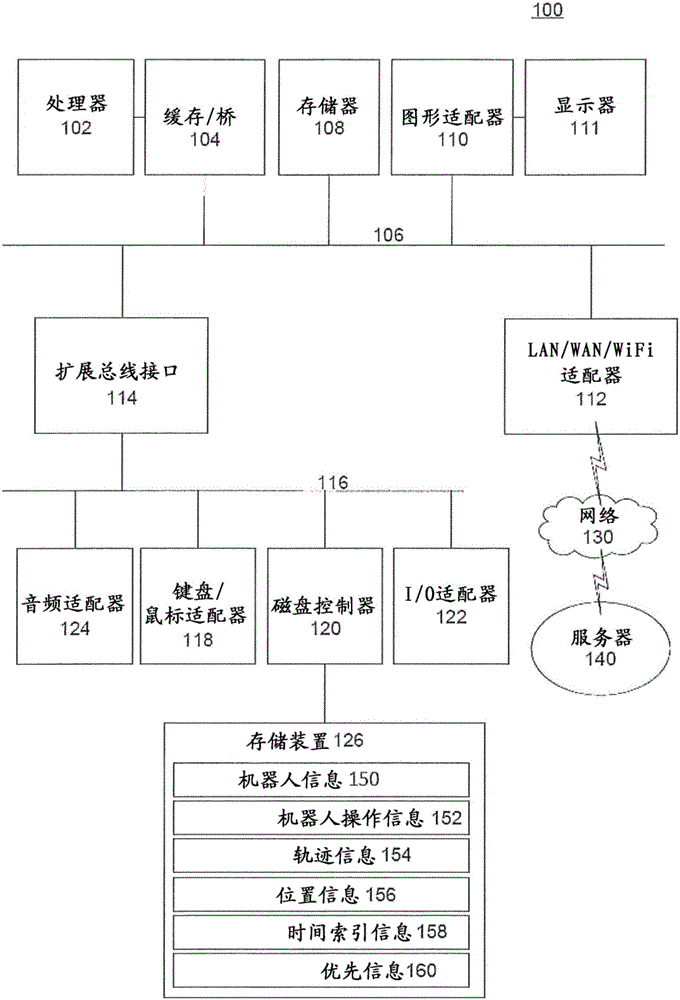
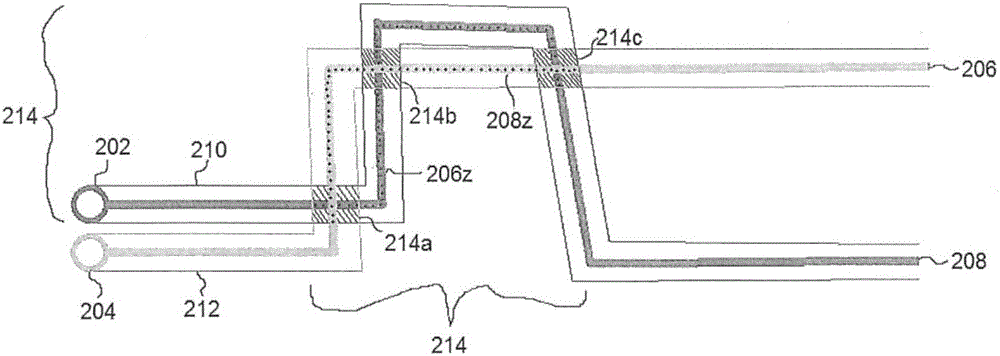
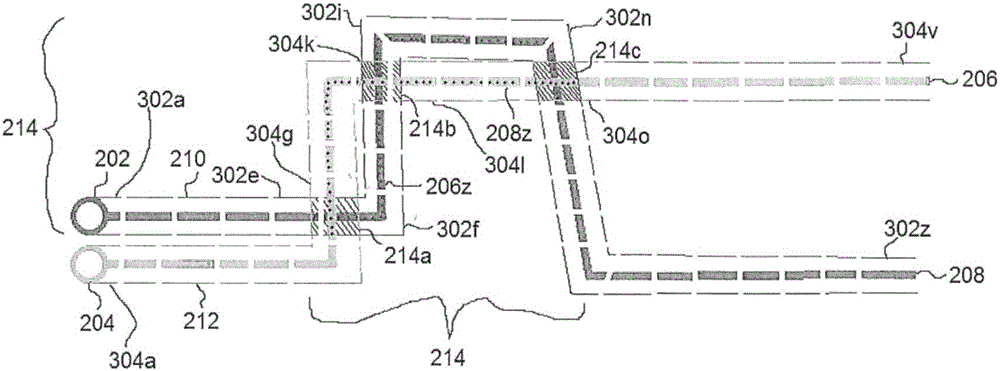
[0013] In this patent document, the following discussed Figure 1 to Figure 5 And the various embodiments used to describe the principles of the disclosure are by way of illustration only and should not be construed in any way as limiting the scope of the disclosure. Those skilled in the art will understand that the principles of the present disclosure may be implemented in any suitably arranged device. The various novel teachings of the present application will be described with reference to exemplary, non-limiting embodiments.
[0014] Cooperative execution of robotic operations of two or more robots Determining the most efficient synchronization to achieve minimum cycle time and increase efficiency requires consideration of various constraints, including: Collisions; whether the robots enter a deadlock situation; and which of the robots is given priority when cooperative execution is not possible due to collisions and / or deadlock situations.
[0015] The robot performs a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More