Human-computer cooperation system based on Kinect skeletal tracking and uncalibrated visual servo
A technology of visual servoing and human-computer collaboration, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of poor working and experience effects of human-computer interaction technology, improve efficiency and flexibility, improve stability, and improve intelligence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below with reference to the accompanying drawings and examples.
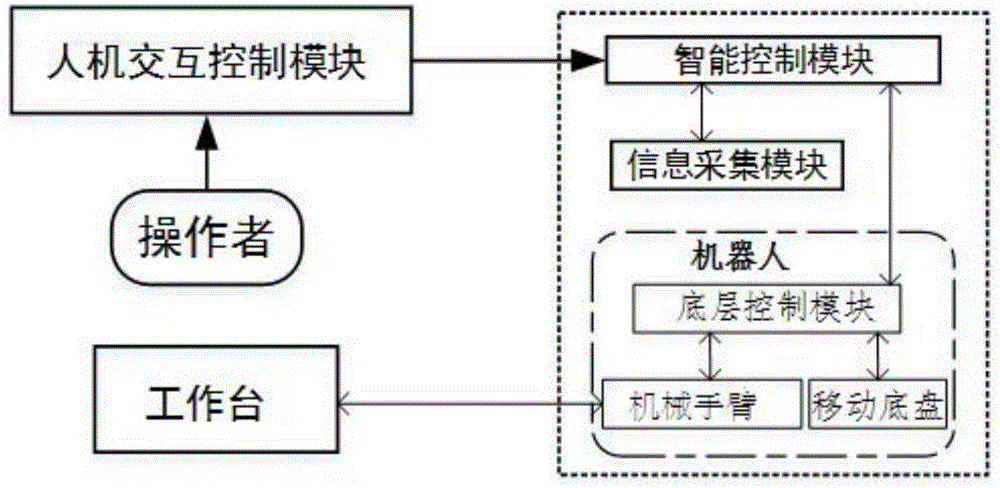
[0019] The invention provides a human-machine collaboration system based on Kinect skeleton tracking and uncalibrated visual servo, including: a robot, a human-computer interaction control module, an information collection module and an intelligent control module;
[0020] Its peripheral equipment is a workbench, which is used to provide a place for the robot to complete work tasks;
[0021] Described human-computer interaction control module comprises Kinect and remote control unit, and described Kinect gathers the posture information of human skeleton by its camera, and this posture information is transmitted to remote control unit, and remote control unit transfers this posture information again To the intelligent control module; wherein, the pose information is an interactive signal for controlling the movement of the robot;
[0022] After the informa...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap