Deep neural network based flexible arm intelligent sensing and control method and system
A deep neural network and intelligent perception technology, applied in the field of intelligent perception and control of flexible arms, can solve the problems of high autonomy requirements of flexible arms, difficult control of flexible arms, and inapplicability, so as to achieve real-time sensing capabilities, improve accuracy and The effect of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
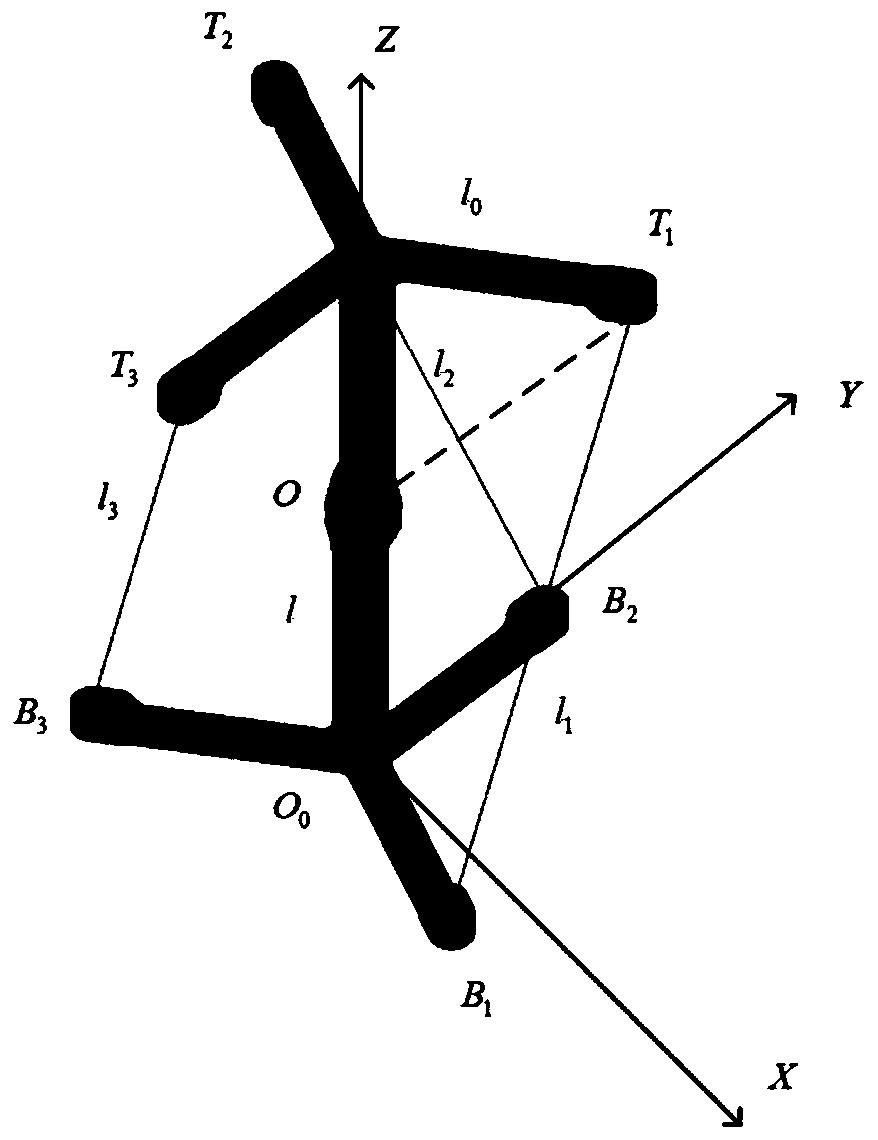
[0040] In view of the above problems, in order to enable the flexible arm to accurately and autonomously complete various functional requirements, the present invention uses a deep neural network to construct the perception system and control system of the flexible arm. The research object is a flexible arm, and its driver adopts a flexible shape memory alloy (SMA) springs. The main structure of the research object consists of two upper and lower symmetrical parts made by 3D printing. In addition, three...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap