

Omnidirectional Wheeled Humanoid Robot Based on Linear Prediction Position and Velocity Controller
一种人形机器人、全方向的技术,应用在车辆位置/路线/高度控制、程序控制机械手、姿态控制等方向,能够解决碰撞管理难等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
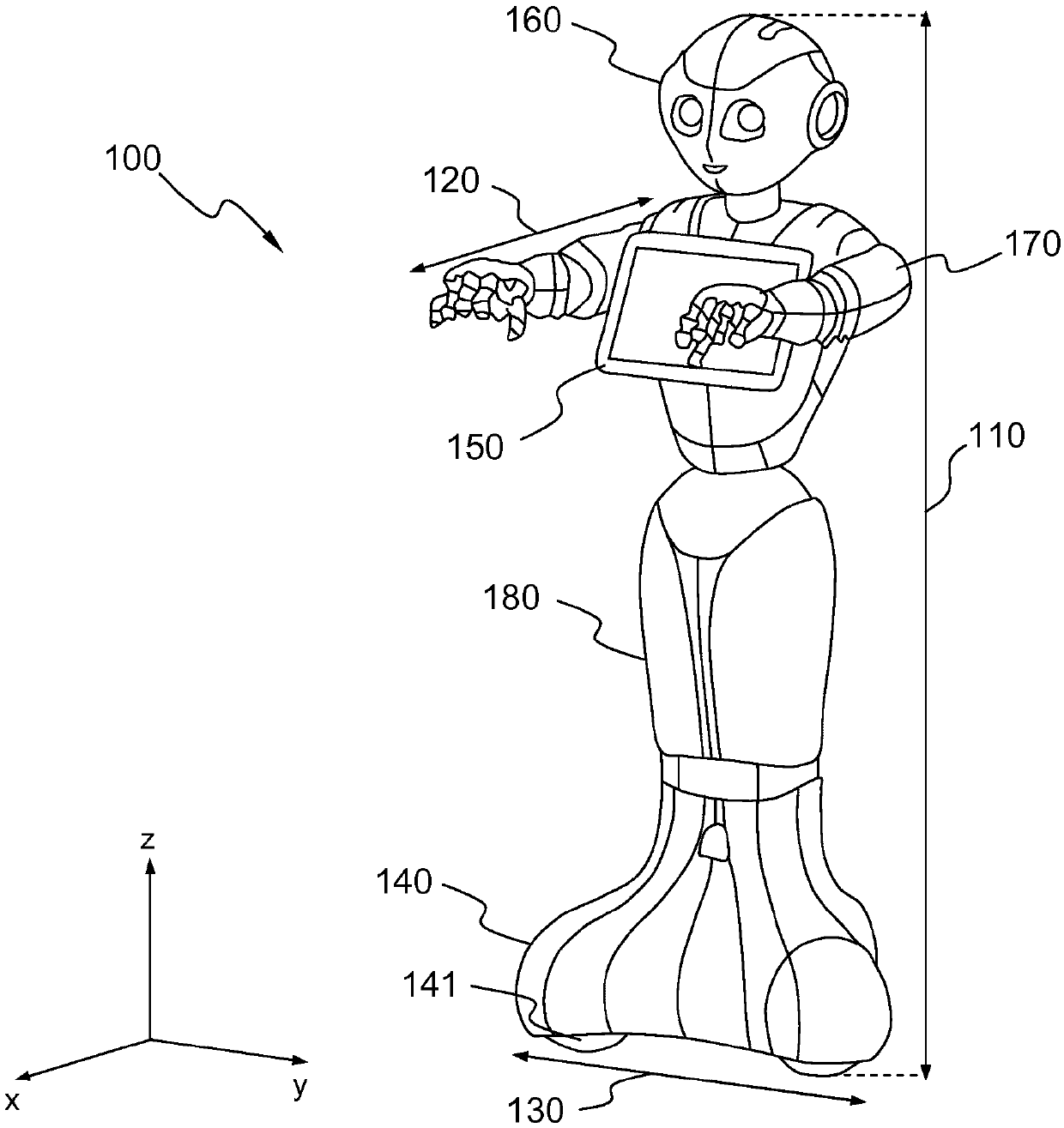
[0087] figure 1 The physical architecture of a humanoid robot in several embodiments of the invention is shown.
[0088] The particular robot 100 in the figures is to be seen only as an example of a humanoid robot in which the invention can be practiced. The lower limbs 180 of the robot in the figure are not used for walking, but are able to move in any direction on its base 140, which rotates on the surface on which it rests. For example, the robot has a height 110 that may be about 120 cm, a depth 120 of about 65 cm, and a width 130 of about 40 cm. In a particular embodiment, the robot of the present invention has a tablet 150 that the robot can use to deliver messages (audio, video, web pages) to its environment or receive input from the user through the tablet's tactile interface. In addition to the processor of the tablet computer, the robot of the present invention also uses the processor of its own motherboard, for example, the processor of the motherboard can be from...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More