

Model and method of large-scale cruising path planning for UAV
A path planning and UAV technology, applied in the direction of navigation calculation tools, etc., can solve problems such as the inability to focus on supervision of water area supervision operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
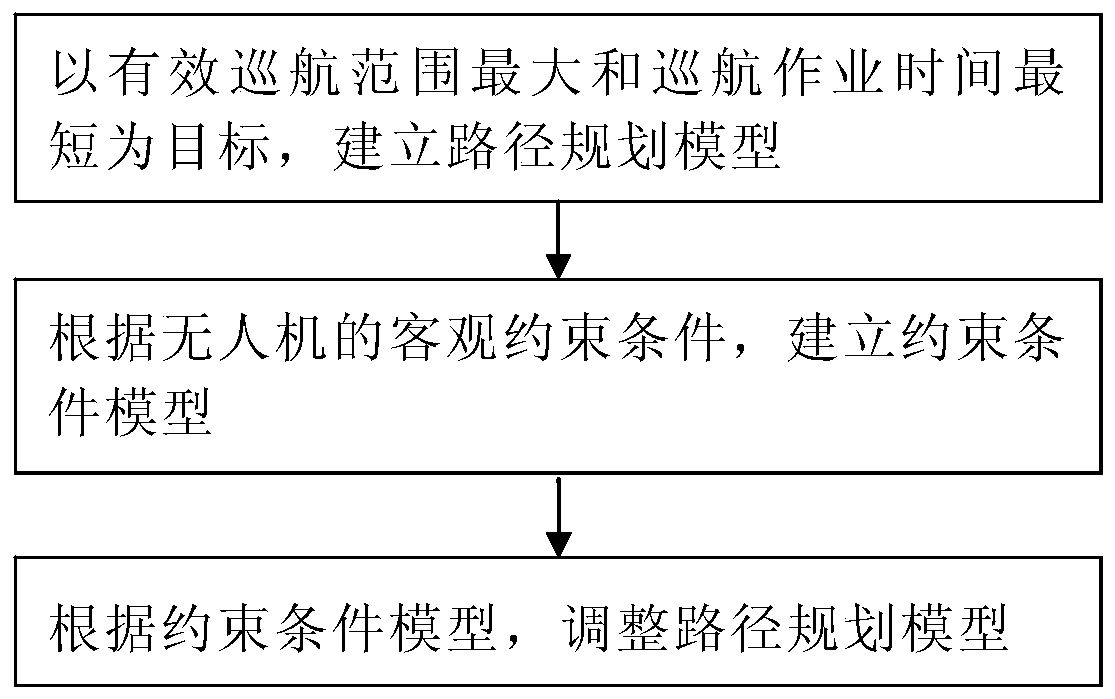
[0085] The large-scale cruising path planning model of the unmanned aerial vehicle disclosed by the present invention, the establishment steps include:
[0086] S10: Aiming at the largest effective cruising range and the shortest cruising operation time, establish a path planning model;
[0087] S101: Establishing an objective function with the largest effective cruising range;
[0088] Let N be the set of key regulatory waters, and i (i=1,2,3,...,n) be the number of key regulatory waters, then there is i∈N, and the area of the i-th key regulatory waters is a i , the risk value is Then the effective cruising area of the i-th key regulatory waters is expressed as Let S be the set of key regulatory waters for a single operation cruise of the UAV, and Then the jth (j=1,2,3,...,n 1 , j∈S) The effective cruising area of cruising water...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More