

Test method and test field for capacity of autonomous driving vehicle in avoiding approaching vehicle
A technology for autonomous driving and testing methods, applied in vehicle testing, machine/structural component testing, measuring devices, etc., can solve problems such as lack, and achieve authoritative and reliable test results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
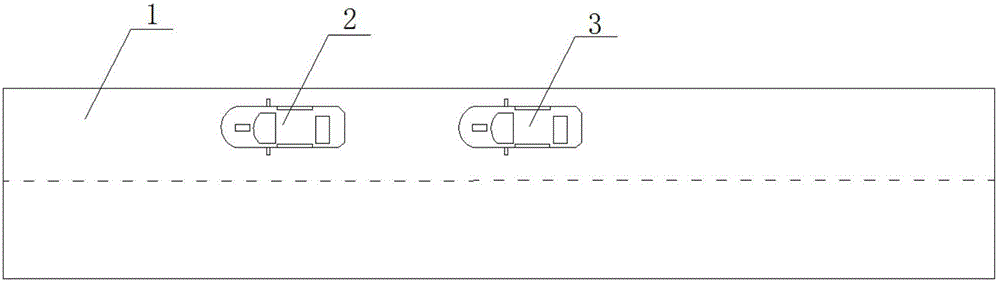
[0037] refer to figure 1 , in this embodiment, firstly, a test field for the ability of an automatic driving vehicle to avoid approaching vehicles is provided.
[0038] The test site includes a road 1 and a first reference vehicle 2. The first reference vehicle 2 can run with an avoidable distance in front of or behind the vehicle 3 to be tested, or run side by side with the vehicle 3 to be tested, or drive with the vehicle 3 to be tested. 3 driving opposite to the vehicle 3 to be tested on the adjacent lane, and then the vehicle speed and / or driving direction can be changed to approach the vehicle 3 to be tested.
[0039] In this embodiment, the road 1 is a one-way street, and the first reference vehicle 2 is driving in front of the vehicle under test 3, and keeps an avoidable distance with the vehicle under test 3, that is, the vehicle under test 3 and the first reference vehicle 2 are at the first Before a reference vehicle 2 changes its speed or direction of travel, the d...
Embodiment 2
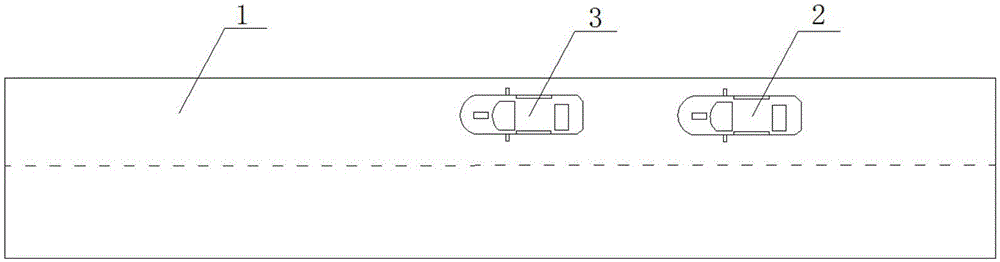
[0067] refer to figure 2 , in this embodiment, the test field is improved on the basis of Embodiment 1, as follows:
[0068] In this embodiment, the first reference vehicle 2 runs behind the vehicle under test 3 , that is, the first reference vehicle 2 follows the vehicle under test 3 , and the first reference vehicle 2 and the vehicle under test 3 maintain an avoidable distance. Then, the first reference vehicle 2 increases the driving speed. At this time, the distance between the vehicle under test 3 and the first reference vehicle 2 is continuously decreasing. If the vehicle under test 3 does not make an action to avoid the first reference vehicle 2, then the vehicle under test 3 will collide with the first reference vehicle 2 . Wherein, the avoidance action made by the vehicle under test 3 may be an action that can avoid or slow down the collision with the first reference vehicle 2 , such as changing lanes.
[0069] Further, in this embodiment, when the first reference ...
Embodiment 3
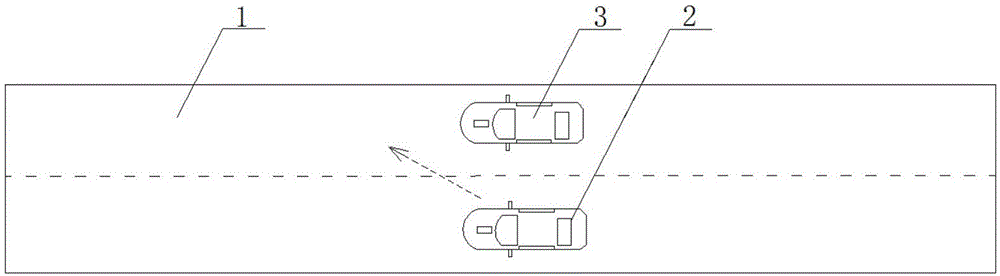
[0077] refer to image 3 , in this embodiment, the test field is improved on the basis of Embodiment 1, as follows:
[0078] In this embodiment, the road 1 has at least two lanes, and the first reference vehicle 2 runs side by side with the vehicle under test 3 in the adjacent lane of the vehicle under test 3 . Then, the first reference vehicle 2 changes direction of travel, (for example with reference to image 3 The dotted arrow in , the first reference vehicle 2 is obliquely inserted in front of the vehicle under test 3 to enter the lane where the vehicle under test 3 is located), at this time the distance between the vehicle under test 3 and the first reference vehicle 2 is continuously decreasing, if the vehicle under test 3 If no action is taken to avoid the first reference vehicle 2 , then the vehicle under test 3 will collide with the first reference vehicle 2 . Wherein, the avoidance action made by the vehicle 3 to be tested may be an action that can avoid or slow d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More