

Speed control method of high-precision traction teaching robot based on impedance model
A technology for teaching robots and impedance models, which is applied in program control, digital control, electrical program control, etc., can solve problems such as difficulty in traction teaching, poor real-time traction effect, and inability to control speed and acceleration. Real-time following effect, real-time tracking effect, effect of improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the present invention will be further introduced below in combination with specific embodiments.
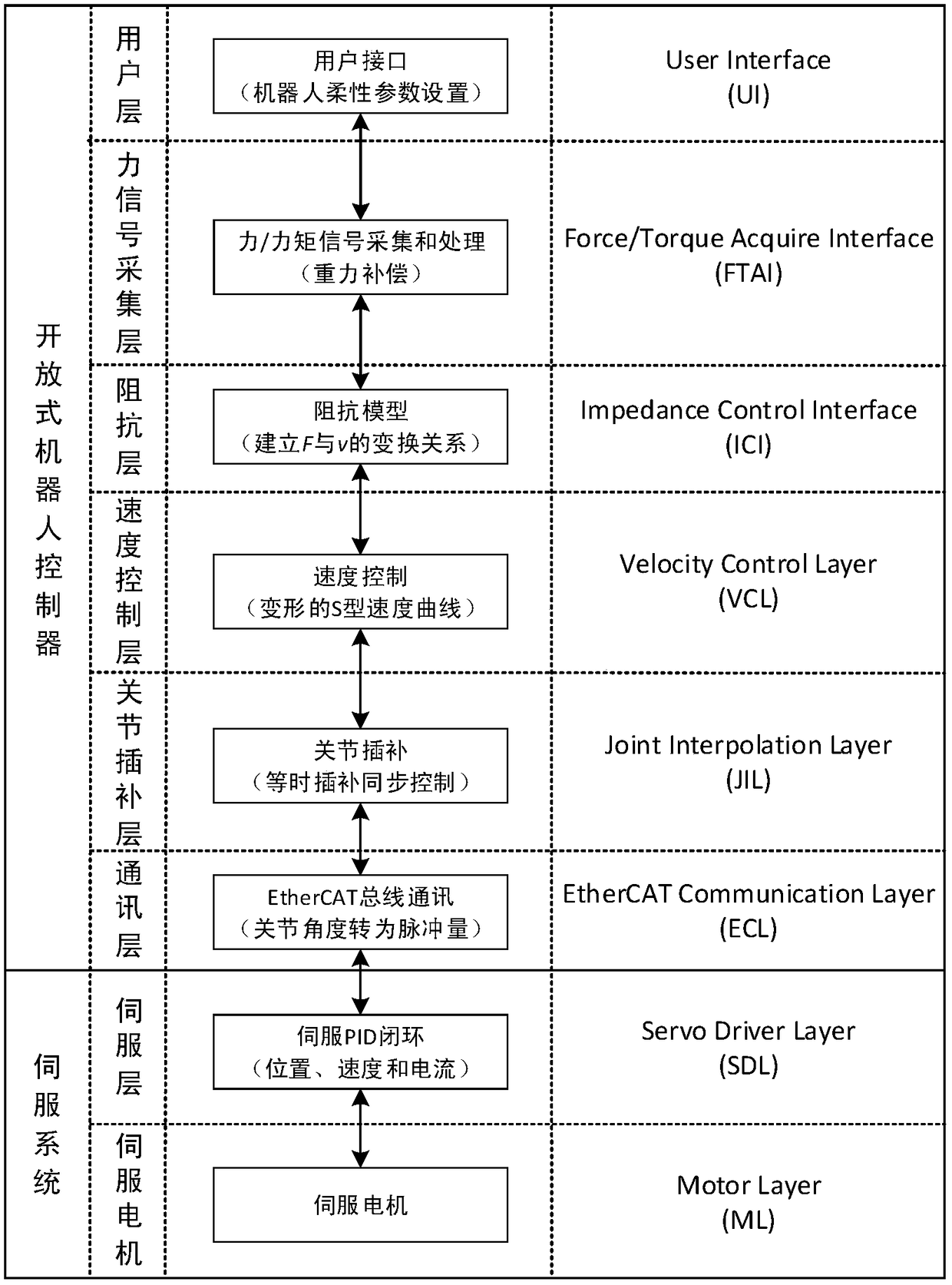
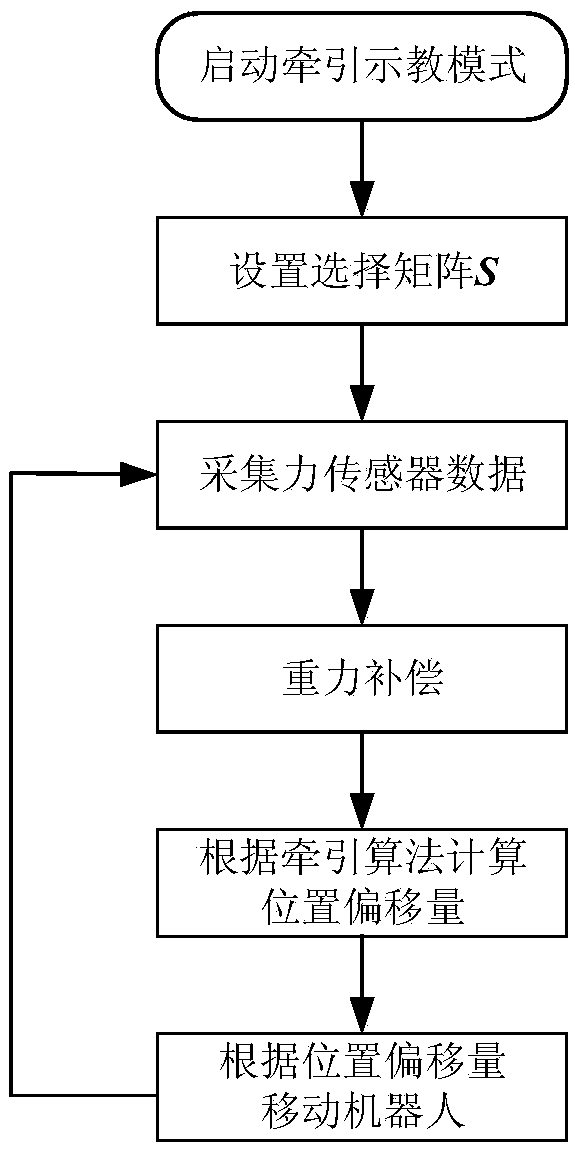
[0037] This specific embodiment discloses a speed control method of a high-precision traction teaching robot based on an impedance model, including the following steps:
[0038] S1: The robot controller collects the information of the six-dimensional force sensor, first filters the collected information, then performs gravity compensation, and finally obtains the deviation data from the expected force or expected torque value;
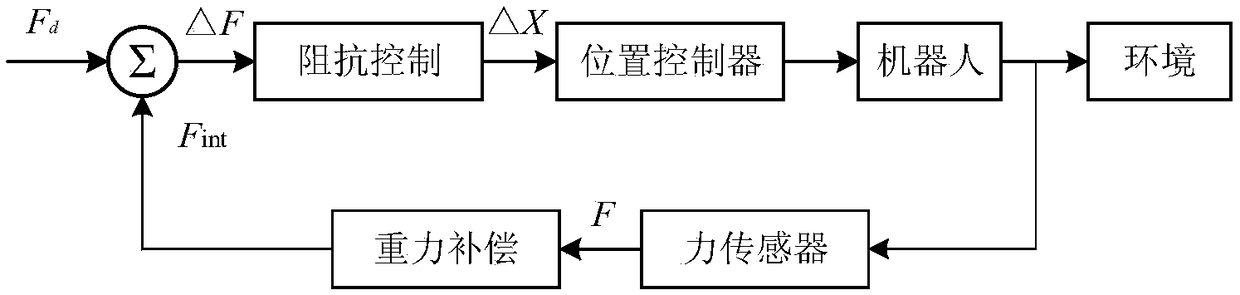
[0039] S2: Transform the force deviation data or torque value deviation data into the speed at which the end of the robot moves in Cartesian space and the angular velocity around the axis according to the impedance model;
[0040] S3: Smoothly interpolate the motion according to the deformed S-shaped speed control curve to obtain the corresponding position function, speed function and acceleration function;
[0041] S4: A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More