

Double-camera three-dimensional recognition patrol robot
A patrol robot and three-dimensional recognition technology, applied in the field of robotics, can solve problems such as difficult to judge the distance of multiple obstacles, unable to give terrain, obstacles, no depth of field, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
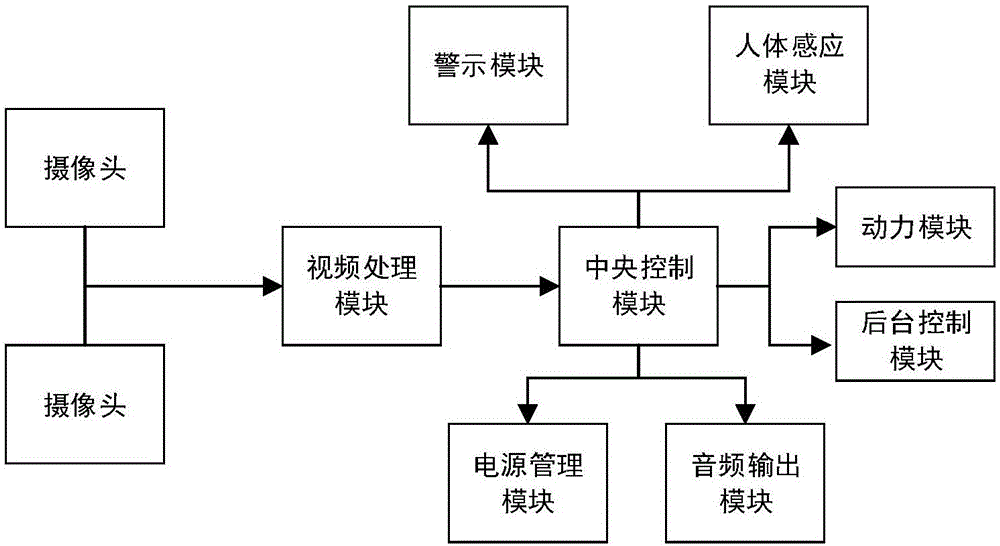
[0024] figure 1 A dual-camera three-dimensional recognition patrol robot is shown, including:
[0025] A pair of cameras arranged at a certain distance on the patrol robot for collecting image information of obstacles in front; the pair of cameras are arranged on both sides of the patrol robot;
[0026] The positioning module is used to obtain the position information of the patrol robot;
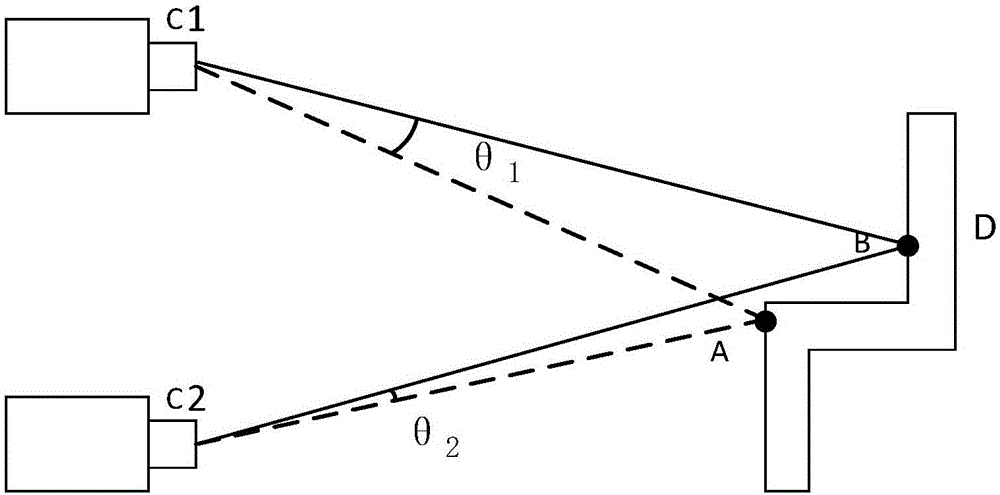
[0027] The video processing module is used to calculate the depth of field difference of every two feature points according to the imaging distance of every two feature points in each camera and the fixed distance between the two cameras on the image information; as figure 2 As show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More