

Behavior safety control method of moving riding nursing robot
A safety control and robot technology, applied in the field of nursing robots, can solve problems such as difficulty in distinguishing heart rate change machines, inability to fully realize robot autonomy, etc., and achieve the effect of reasonable action and attitude control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the purpose and technical solution of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings, but this should not be used as a limitation to the protection scope of the claims of the present application.
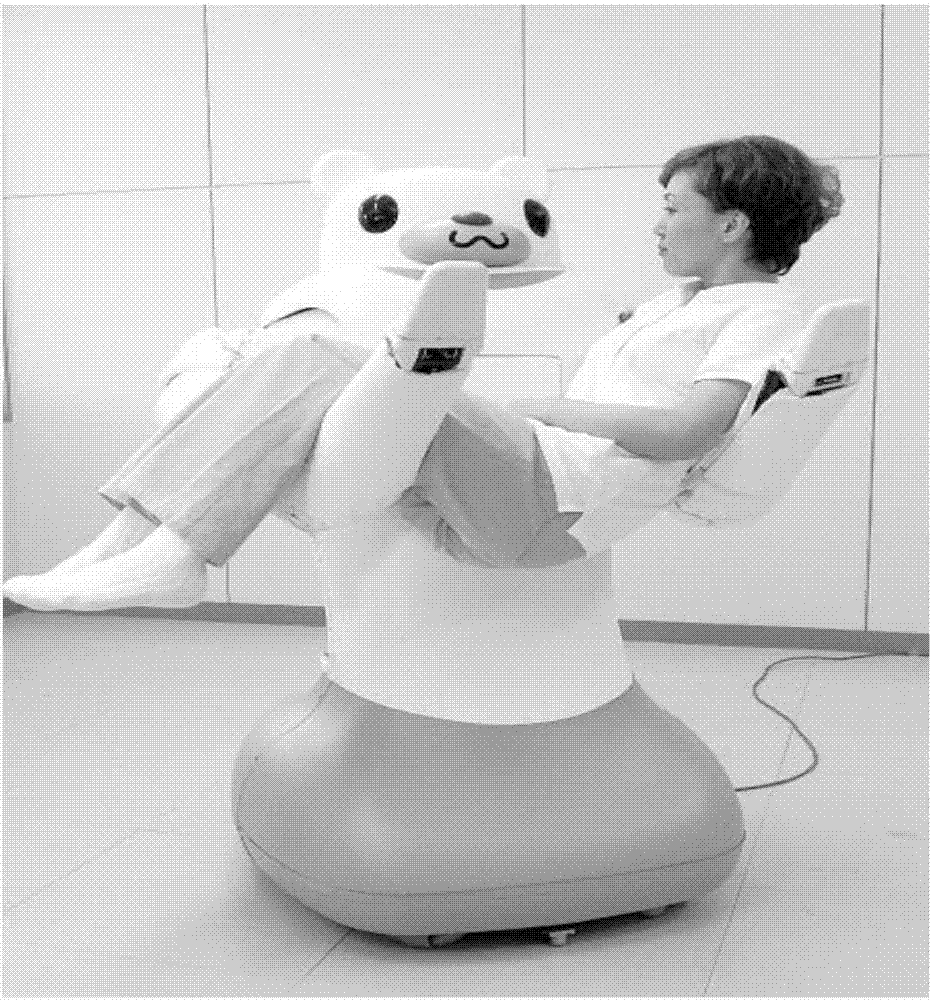
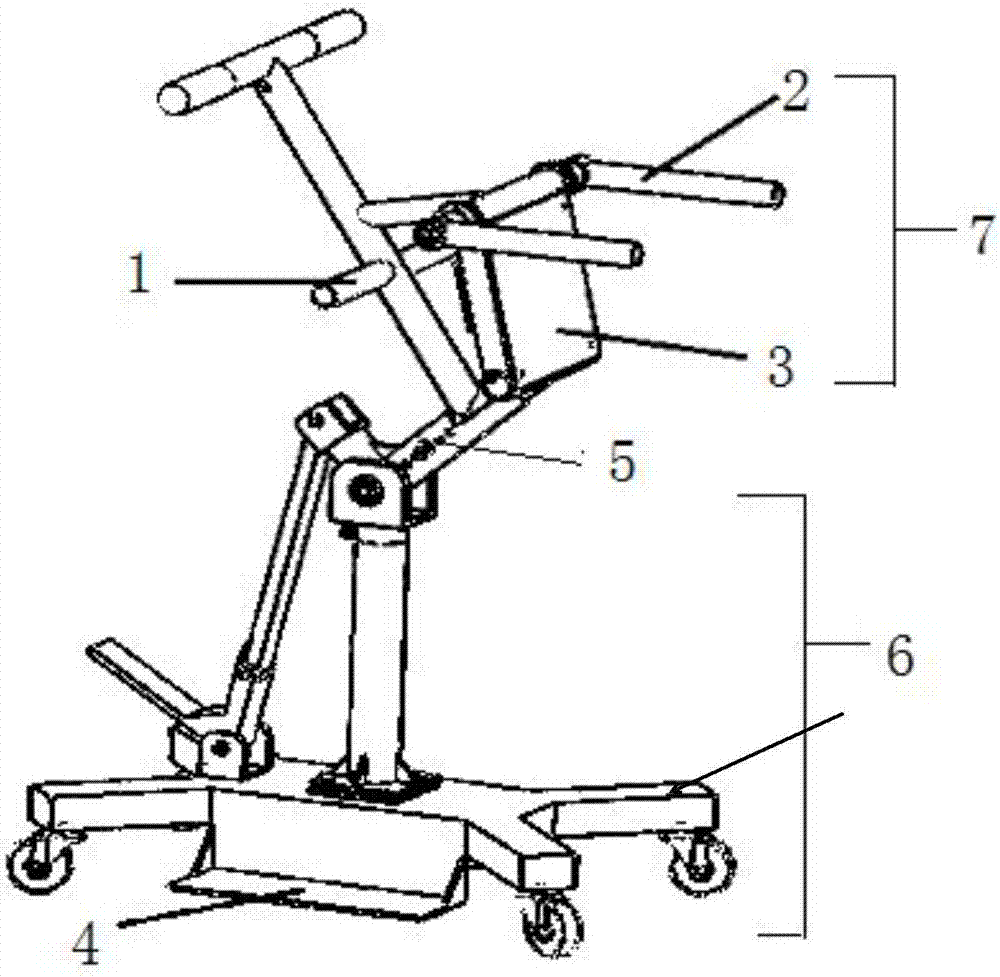
[0040] The behavior safety control method (referred to as the method) of the transfer nursing robot of the present invention, the transfer nursing robot (see figure 2 ) is transferred in a front-hugging manner, including a lower fixed part 6 and an upper supporting part 7, the middle of which is connected by a rotating arm 5, the lower end of the rotating arm is connected with the lower fixed part, the upper end of the rotating arm is connected with the upper supporting part, and the lower end of the rotating arm The first drive motor and the first photoelectric encoder need to be installed at the connection position with the lower fixed part; the upp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More