

Target tracking method and device
A target tracking and target technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve problems such as the decline of tracking accuracy, achieve high-accuracy tracking, and solve the effect of mutual occlusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
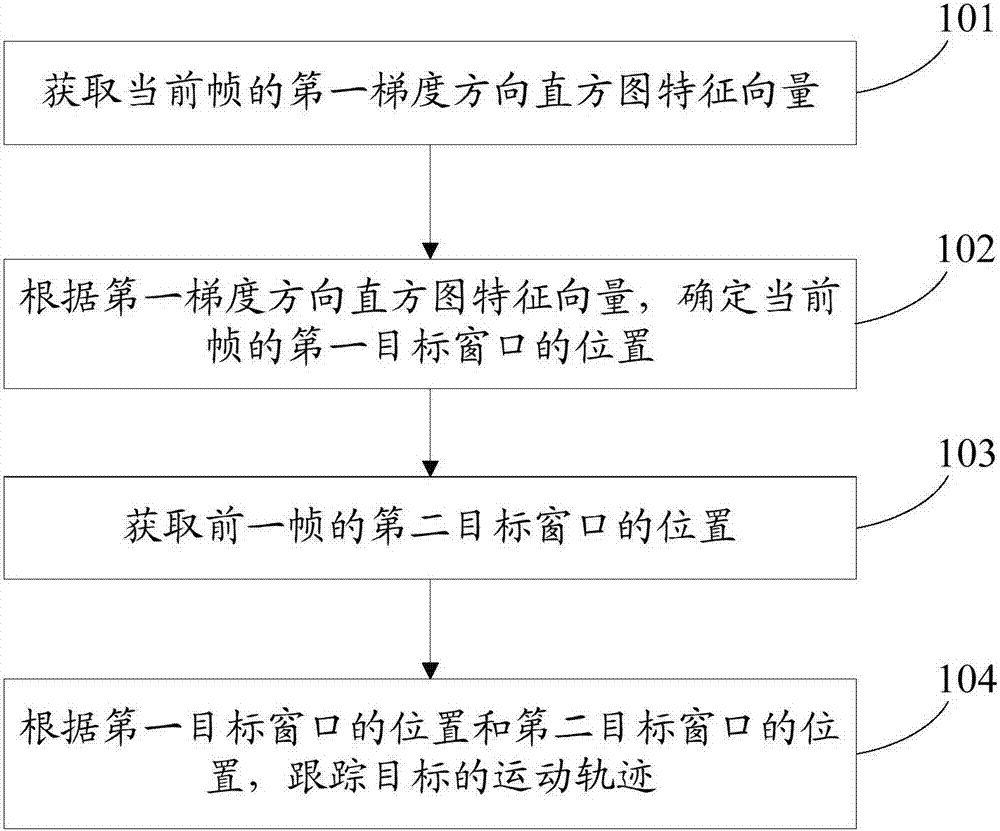
[0069] An embodiment of the present invention provides a target tracking method, which is applied to a target tracking device. The device may be a part of a server, or a separate device. The method provided in this embodiment is applied to each frame in a real-time video stream detection, such as figure 1 As shown, the method includes:
[0070] Step 101. Obtain the first gradient orientation histogram feature vector of the current frame.
[0071] First, collect the current frame and normalize the current frame to an image of a*a pixels. Calculate the gradient direction histogram of the picture, wherein when calculating the gradient direction histogram feature vector, it is calculated by using the method of large window (large window is b*b pixel) and small window (small window is c*c pixel) . Specifically, on the current frame, move through the above-mentioned large window and small window with a step size of s, and calculate the gradient direction every time a new position...
Embodiment 2
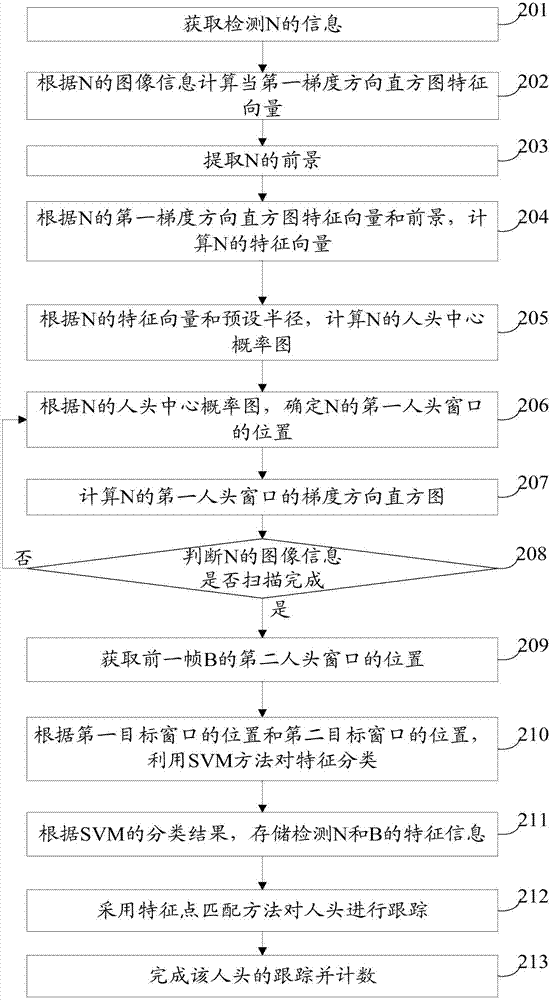
[0107] An embodiment of the present invention provides a target tracking method, which is applied to a target tracking device, such as figure 2 As shown, assuming that I is a detection image, its current frame is represented by N, and the previous frame is represented by B. The detection image information I obtained in this embodiment is the image information of a shopping mall in Haidian District, Beijing on December 10, 2015 , the target that needs to be tracked is a human head, the method includes:
[0108] Step 201 , acquire image information of detection N.
[0109] Specifically, the detection N is acquired through a vertically downward camera, and the information of I is obtained through computer digitized image information processing.
[0110] Step 202. Calculate the feature vector of the first gradient orientation histogram according to the image information of N.
[0111] Here, according to the method described in step 101 in the first embodiment, the feature vecto...
Embodiment 3
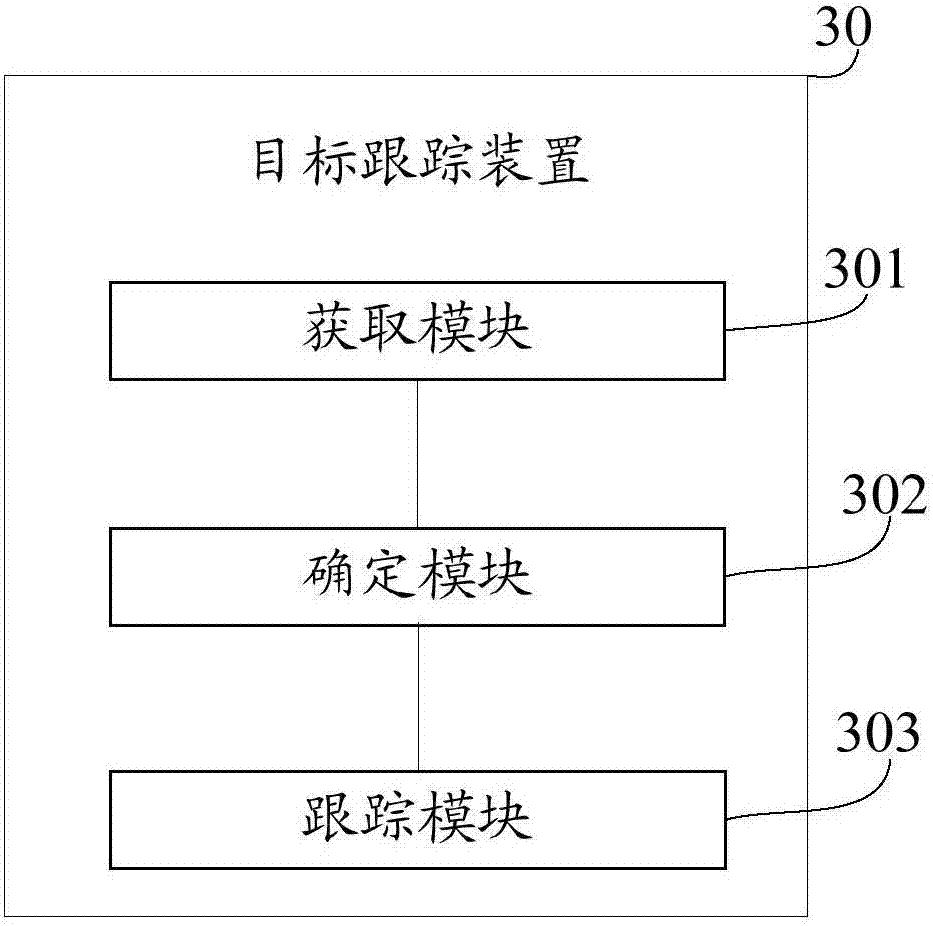
[0138] An embodiment of the present invention provides a target tracking device 30, such as image 3 As shown, the device 30 includes:
[0139] An acquisition module 301, configured to acquire the first gradient orientation histogram feature vector of the current frame;
[0140] A determination module 302, configured to determine the position of the first target window of the current frame according to the feature vector of the first gradient direction histogram, the first target window is a window for determining the position of the target in the current frame ; Also used to obtain the position of the second target window of the previous frame;
[0141] A tracking module 303, configured to track the movement track of the target according to the position of the first target window and the position of the second target window.
[0142] In this way, a large number of targets can be accurately and efficiently detected and identified according to the first target window and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More