

An angular rate calculation and compensation method for table body drift caused by base motion
A compensation method and angular rate technology, applied in navigation calculation tools, navigation through velocity/acceleration measurement, instruments, etc., can solve the problem of losing the control function of the outer frame axis, there is no clear calculation method, and it is difficult to meet the large maneuvering motion of the carrier. requirements and other issues to achieve the effect of improving the accuracy of navigation and guidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
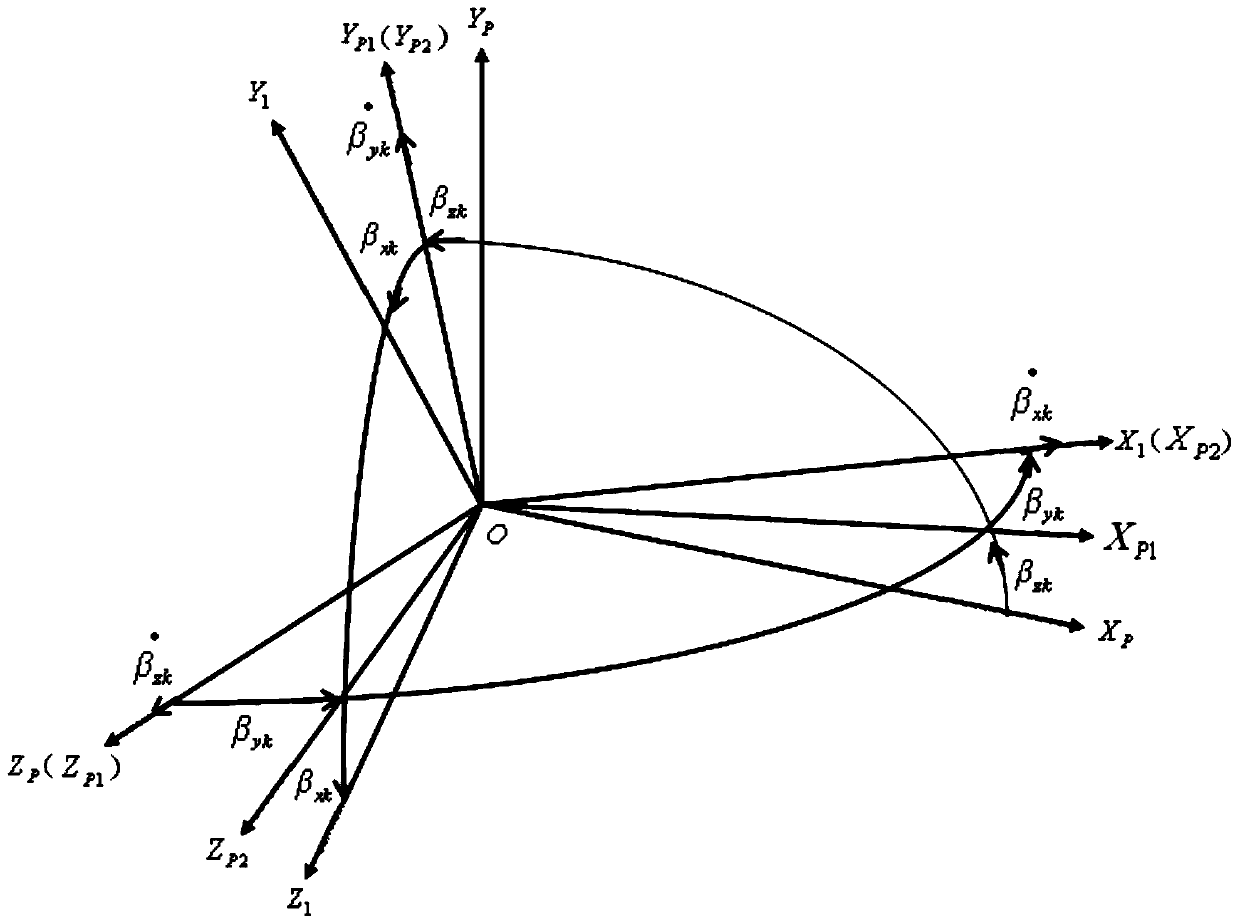
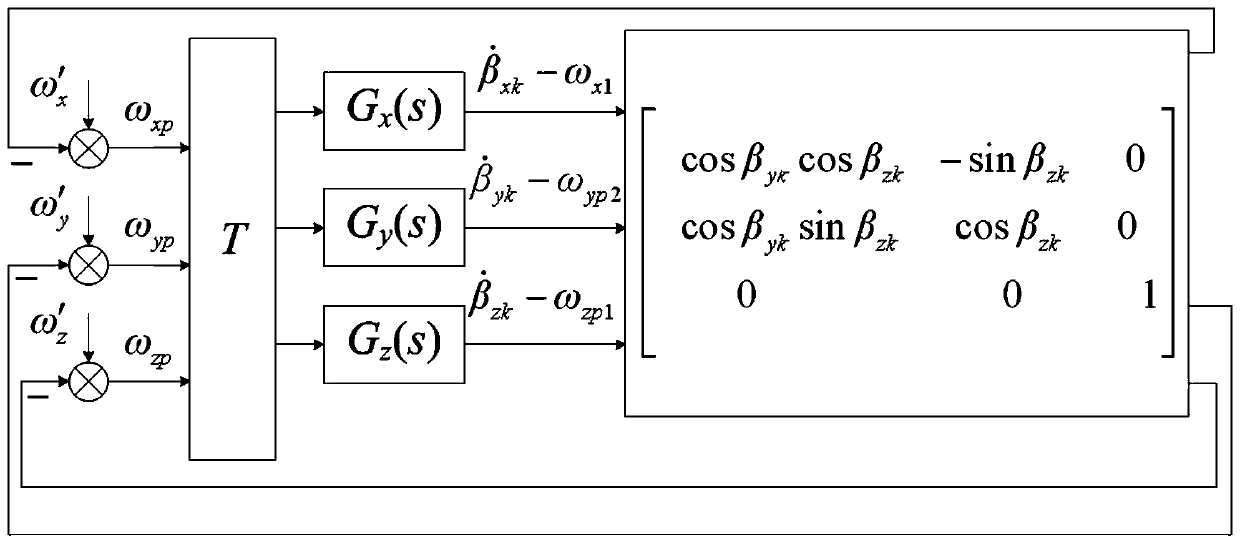
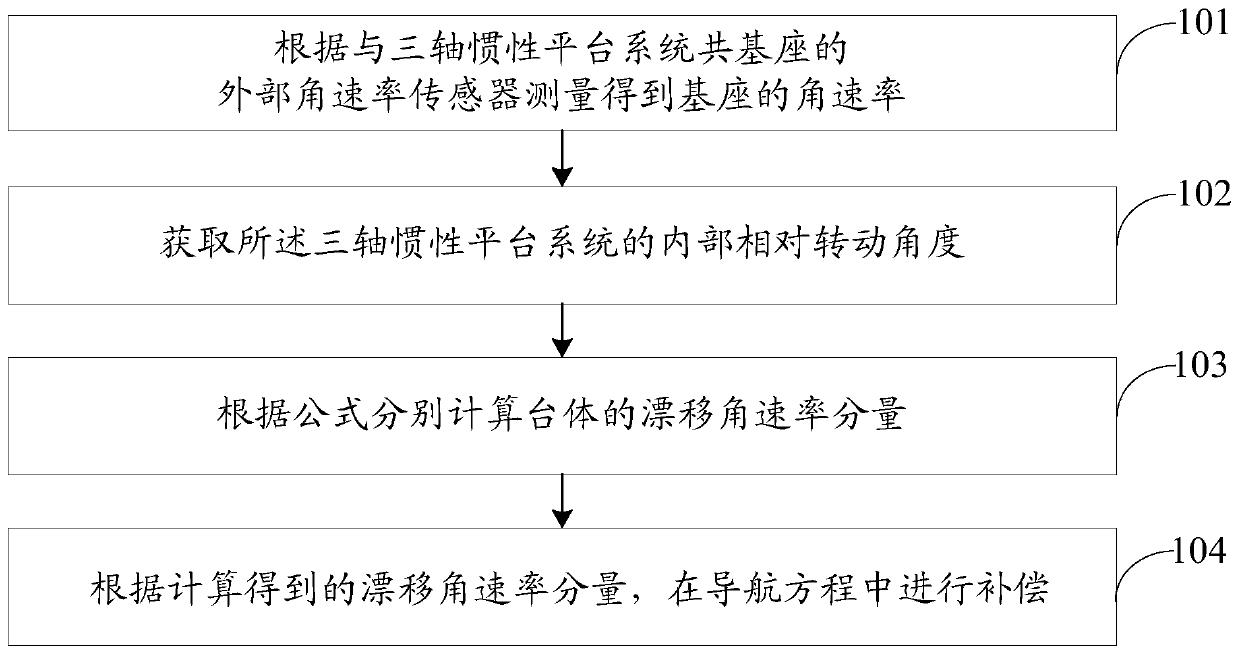
[0029] The method for calculating and compensating the angular rate of the platform body drift caused by the movement of the base in the present invention is aimed at the plane coordinate resolver, and the angular rate ω of the base movement is used x1 , ω y1 and ω z1 , the inner frame around the body coordinate system Z P Angle of shaft rotation β zk , Y of the outer frame around the body coordinate system of the inner frame P1 Angle of shaft rotation β yk , and the X of the base around the body coordinate system of the outer frame P2 Angle of shaft rotation β xk 6 variables are used as input information, and the drift angular rate ω of the platform is calculated after information fusion xp , ω yp and ω zp ; and ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More