Data glove calibration method based on joint correlation analysis
A technology of correlation analysis and data gloves, applied in the direction of electrical digital data processing, input/output process of data processing, input/output of user/computer interaction, etc., can solve the problem of poor accuracy of mapping relationship and achieve accurate calibration Effect
Active Publication Date: 2018-02-16
HARBIN INST OF TECH
View PDF4 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The purpose of the present invention is to solve the problem of poor accuracy of the mapping relationship when the glove reading data and the actual joint data of the human hand are regarded as a linear relationship to calibrate the glove, and to provide a data glove calibration method based on joint correlation analysis
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
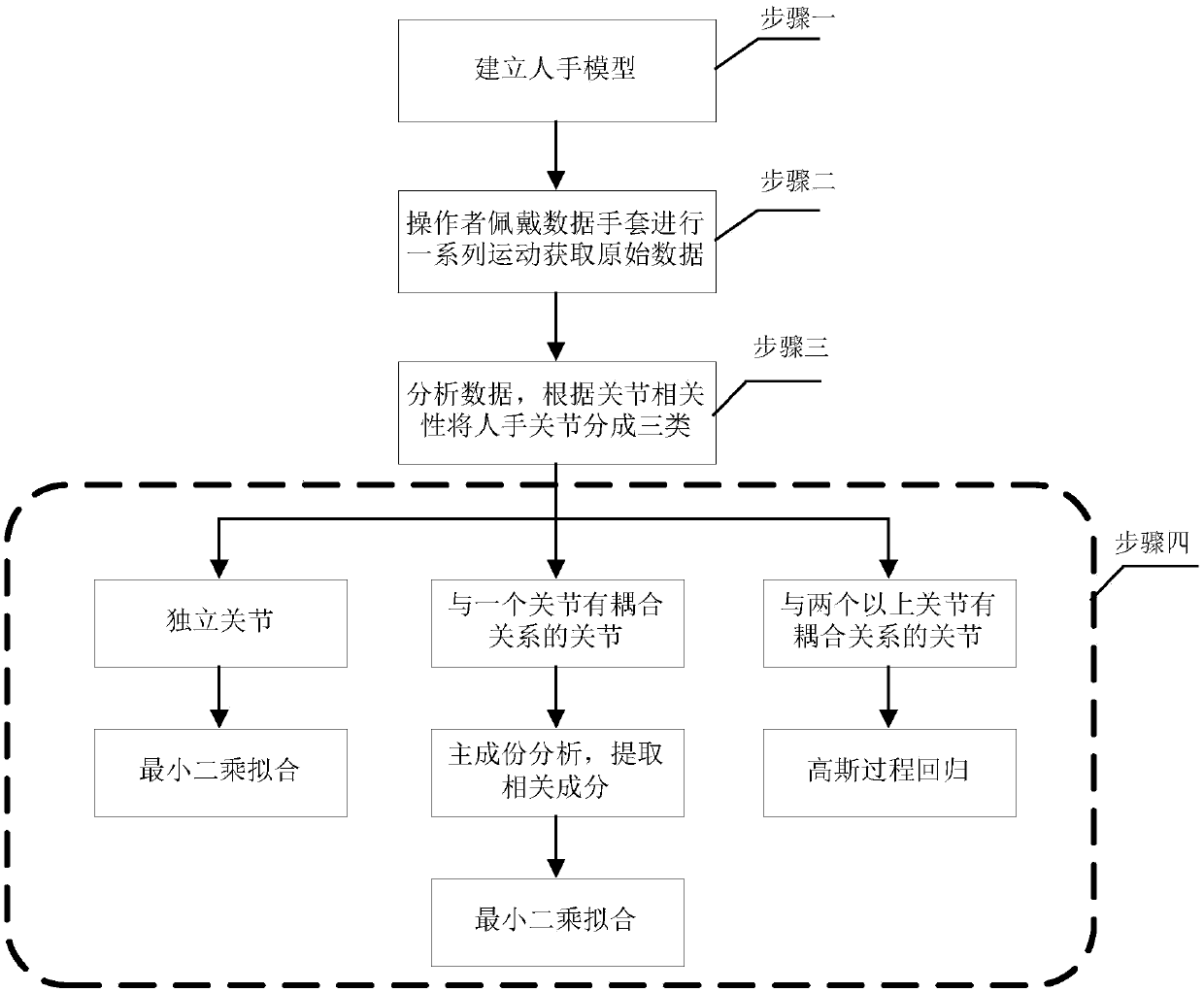
The invention discloses a data glove calibration method based on joint correlation analysis and belongs to the field of data glove calibration technology. The method aims to solve the problem that when reading data of a glove and actual joint data of a human hand are regarded to be in a linear relation for calibration of the glove, a mapping relation between the reading data and the joint data ispoor in accuracy. According to the method, first, a human hand model is established, and sensors, corresponding to all joints, in the data glove are determined according to the human hand model; an operator wears the data glove to perform a stipulated action, and stipulated action data of the operator is obtained; according to each joint, correlation analysis is performed on the corresponding stipulated action data, and the joints in the human hand model are dived into independent joints, single-coupling joints and multi-coupling joints according to different correlations; and the stipulated action data corresponding to each joint is processed, the mapping relation between the corresponding stipulated action data and the corresponding joints in the human hand model is obtained, and the data glove is calibrated according to the mapping relation. The method is used for calibration of the data glove.
Description
Data glove calibration method based on joint correlation analysis technical field The invention relates to a data glove calibration method based on joint correlation analysis, and belongs to the technical field of data glove calibration. Background technique As the most dexterous actuator in nature, the human hand has more than 20 degrees of freedom and can use various tools flexibly. As an effective extension of the human hand, the robotic dexterous hand has been a popular research direction in the field of robotics since the second half of the 20th century due to its strong versatility, rich perception capabilities, and the ability to achieve precise and stable grasping that meets geometric closure and force closure. It has been extensively studied by researchers from various countries, but achieving the stability and dexterity of dexterous hand grasping has always been a difficulty in this field. In order to make dexterous hands possess the flexibility of human hands, ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06F3/01
CPCG06F3/014
Inventor 蒋再男李重阳杨帆
Owner HARBIN INST OF TECH
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com