

Method and device for local path motion planning of unmanned vehicles
A driverless car, local path technology, applied in transportation and packaging, vehicle position/route/altitude control, motor vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
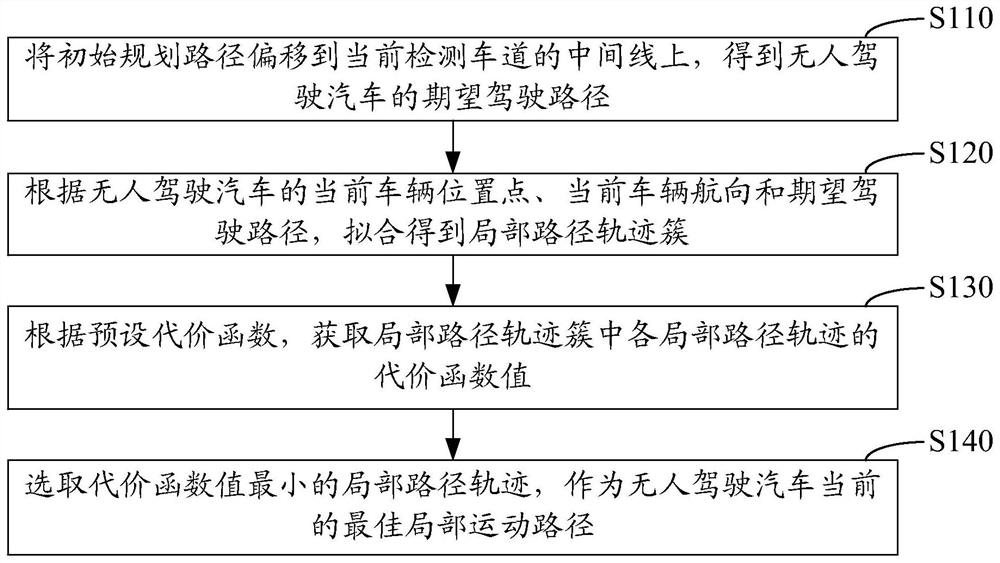
[0051] In order to solve the problem of the optimal motion path that cannot be planned by traditional unmanned vehicles, the present invention provides an embodiment 1 of a local path motion planning method for unmanned vehicles; figure 1 It is a schematic flow chart of Embodiment 1 of the local path motion planning method for unmanned vehicles of the present invention; as figure 1 As shown, the following steps may be included:
[0052] Step S110: Offset the initial planning path to the middle line of the currently detected lane to obtain the expected driving path of the driverless car;
[0053]Specifically, the embodiment of the present invention provides a local path motion planning strategy for an unmanned vehicle, which can be applied to the local path motion planning in the motion planning layer of the decision-making control system of the unmanned vehicle.
[0054] The expected driving path can be processed by the behavior decision-making layer software of the unmanned ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More