

A time-optimal trajectory planning method and device for robot operation space
A technology of operating space and trajectory planning, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as joint overspeed, large restrictions, and reduced production efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
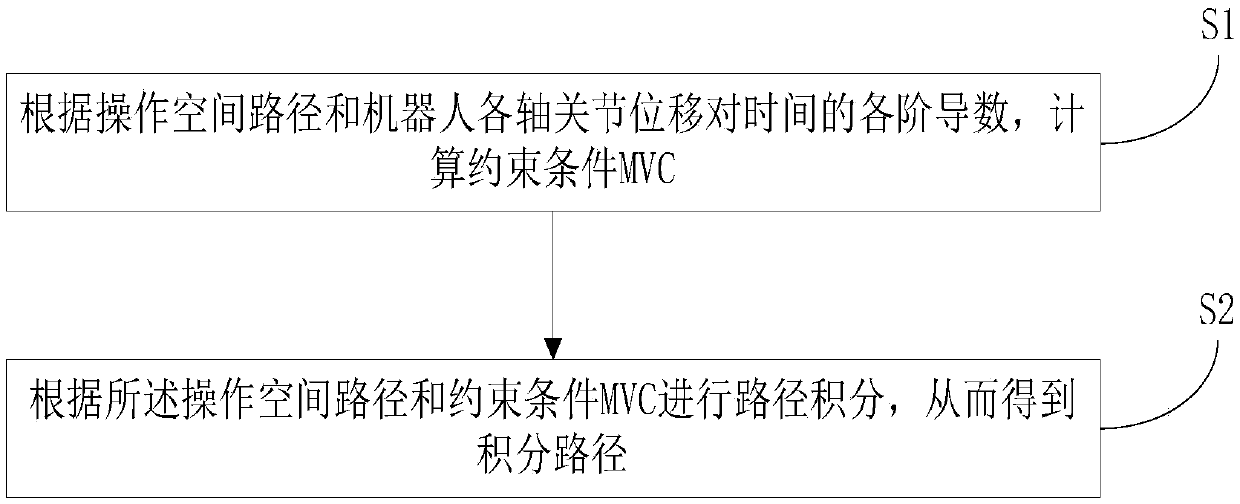
[0049] The present invention is a time-optimal trajectory planning method for robot operating space, such as figure 1 As shown, including the following steps:
[0050] S1. Calculate the constraint curve MVC according to the given operating space path related to the arc length parameter and the set derivatives of each axis joint displacement of the robot with respect to time;
[0051] S2. Perform path integration in the operation space according to the operation space path and the constraint curve MVC, and the obtained integration path is the time-optimal trajectory planning result.
[0052] The operating space path can be expressed mathematically by f(s), where s is the arc length parameter, and the operating space path f(s) is given, which is related to the task of the robot. At the same time, the joint displacement of each axis of the robot versus time The derivative of each order is also set according to the task. The derivatives of the joint displacement of each axis of the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More