

UAV flight path distribution method and device
A flight path and path allocation technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments, etc., can solve the problems of uncertain optimization results, weak theoretical foundation, and restricting algorithm application, and achieve parallel flight. Short time, optimal path allocation, to achieve the effect of path allocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
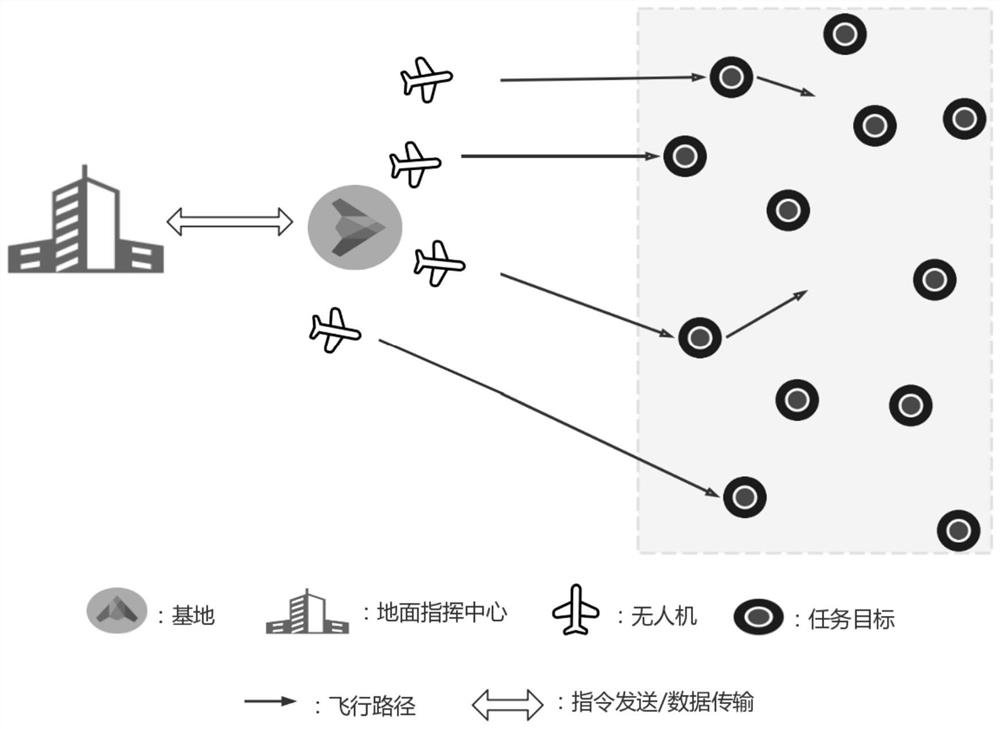
[0039] figure 1 It is a schematic diagram of the scene of the UAV flight path allocation method and device of the present invention; that is, consider the scene of optimal path allocation when the UAV (unmanned aerial vehicle, UAV) in the UAV base needs to perform multiple tasks at the same time .
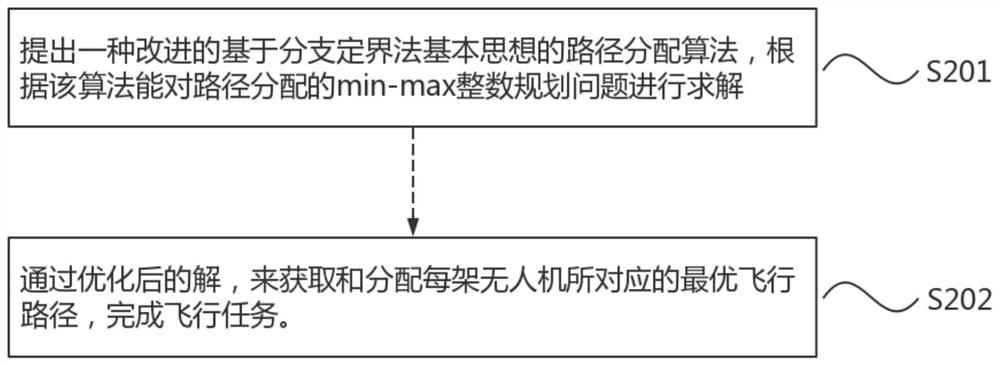
[0040] figure 2 It is a schematic flow chart of the UAV flight path allocation method of the present invention, including:
[0041] S201. Solve the min-max integer programming problem of path allocation through the improved path allocation algorithm based on the basic idea of the branch and bound method;
[0042] S202. Obtain and allocate the optimal flight path corresponding to each drone through the optimized solution to complete the flight task.
[0043] Specifically, the present invention will illustrate the proposed UAV flight path a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More