

Unmanned aerial vehicle three-dimensional route planning method based RFID inventory verification
A path planning and unmanned aerial vehicle technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problems of no path planning, no planning of three-dimensional flight paths involving information collection, and lack of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
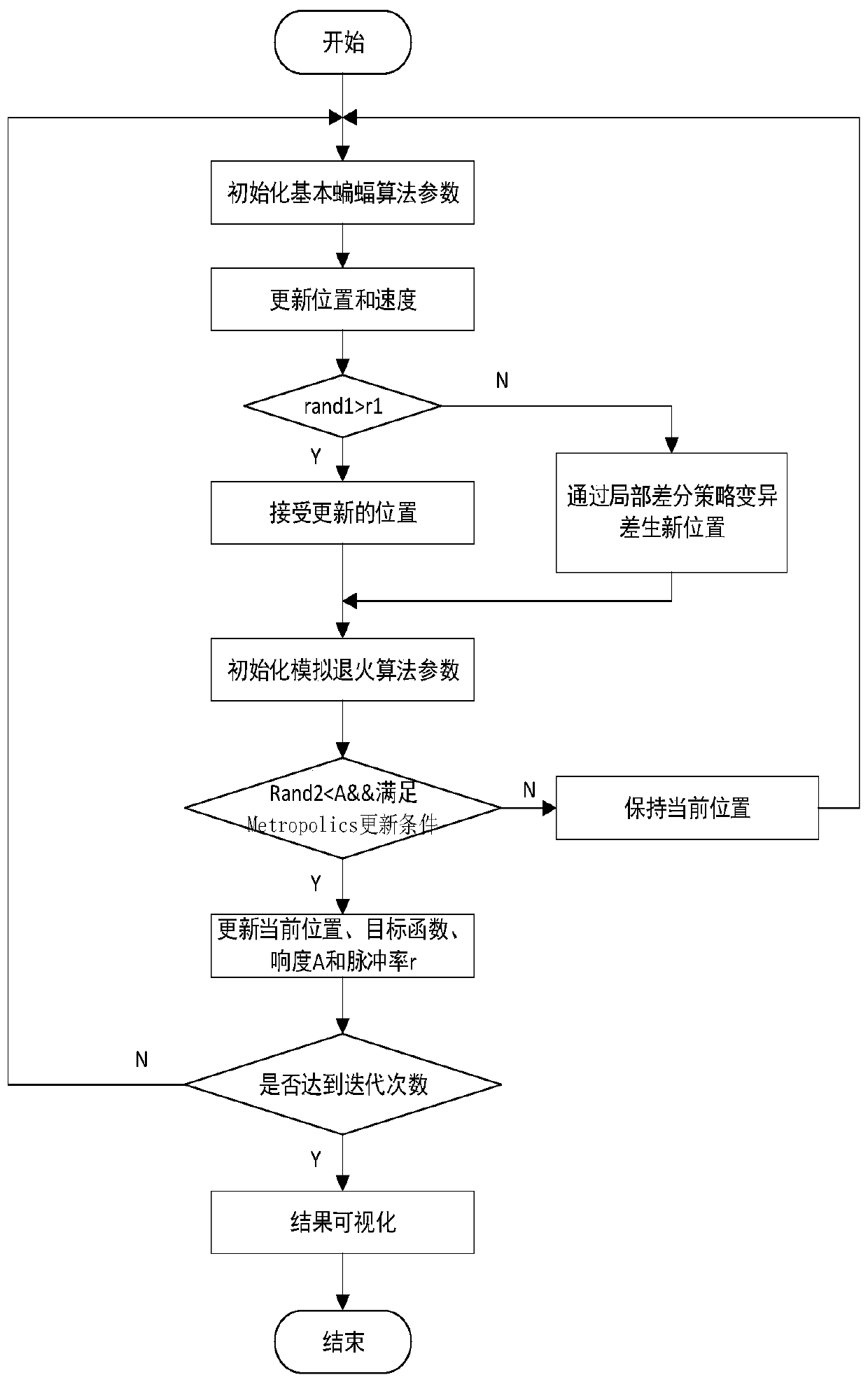
[0070] In this example, the Quantum Behavioral Particle Swarm Algorithm (QPSO) studied by Zhang Hang et al. and the hybrid bat algorithm based on quadratic differential evolution are used as comparison algorithms to verify the effectiveness of the method proposed by the present invention.
[0071] Describe the present invention below in conjunction with specific embodiment:
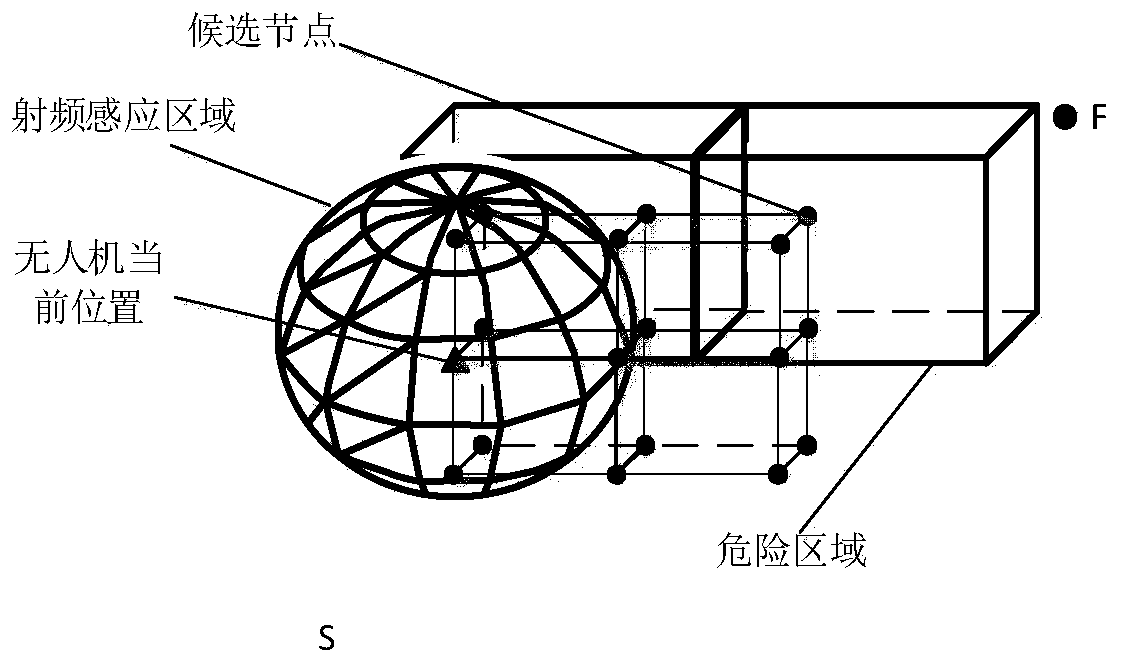
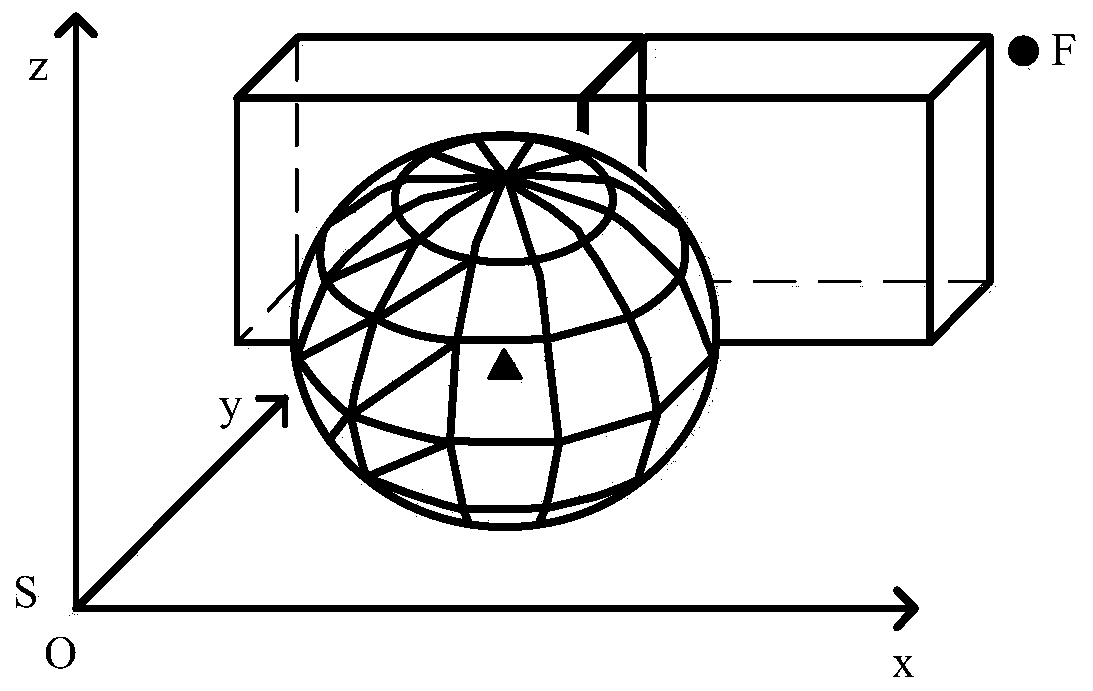
[0072] In this example, the UAV 3D path planning method based on RFID inventory inventory adopts the following steps:
[0073] Step 1: Use Mathlab7.11.0 as the simulation platform to collect the location and size of obstacles and information collection points in the production workshop (this paper uses cuboids to replace obstacles and information collection points) data information, and establish a corresponding production workshop model;
[0074] Step 2: Use the Quantum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More