

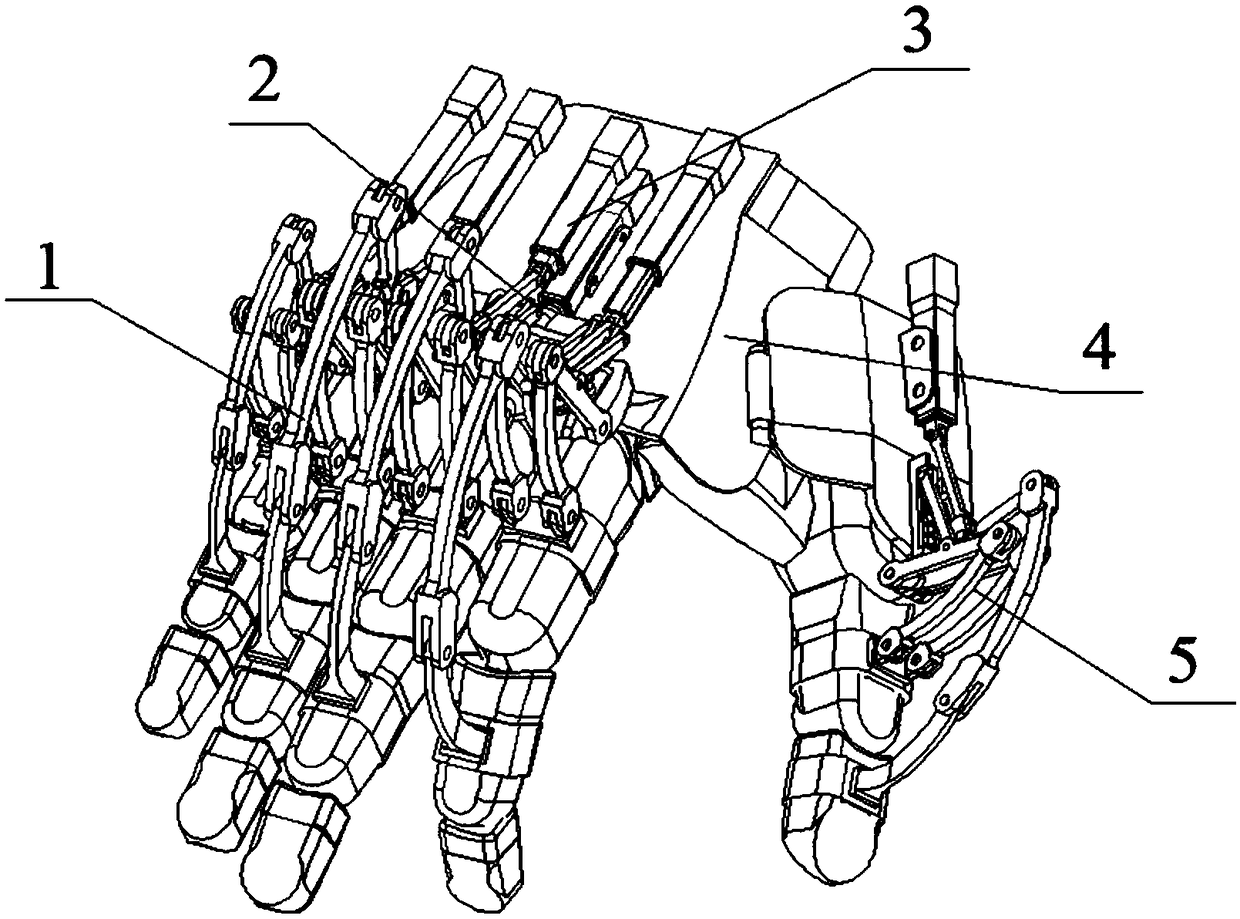
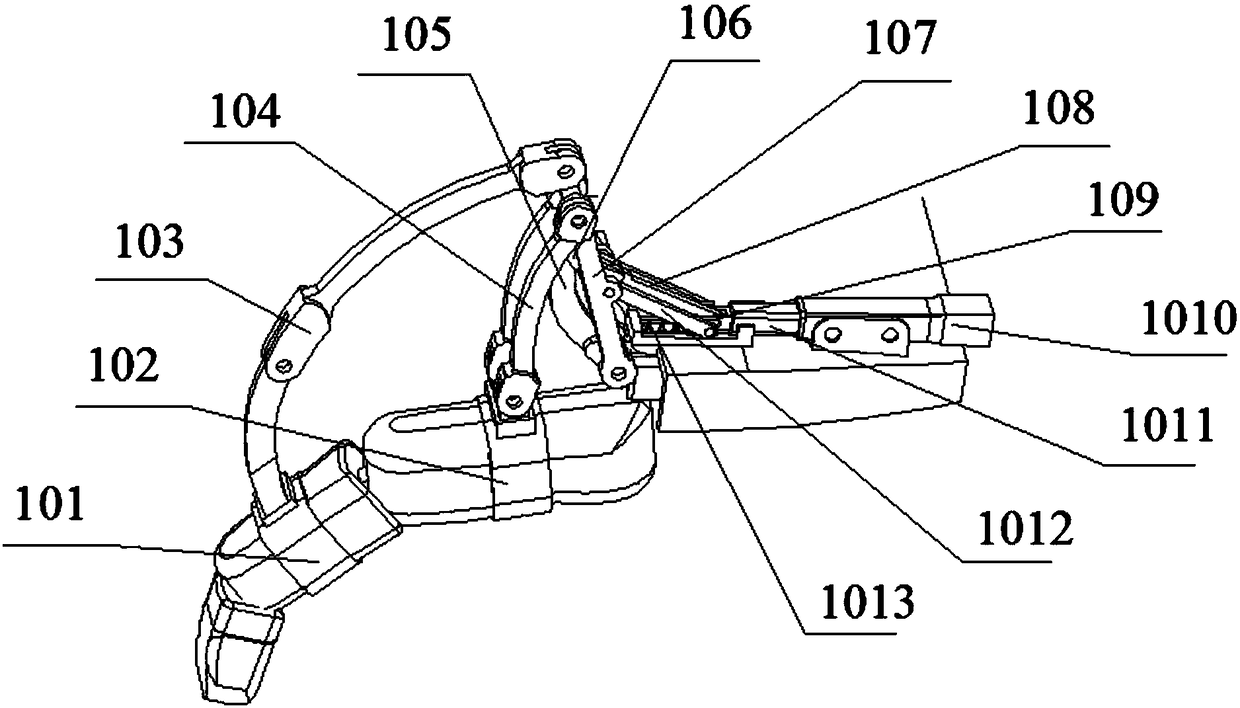
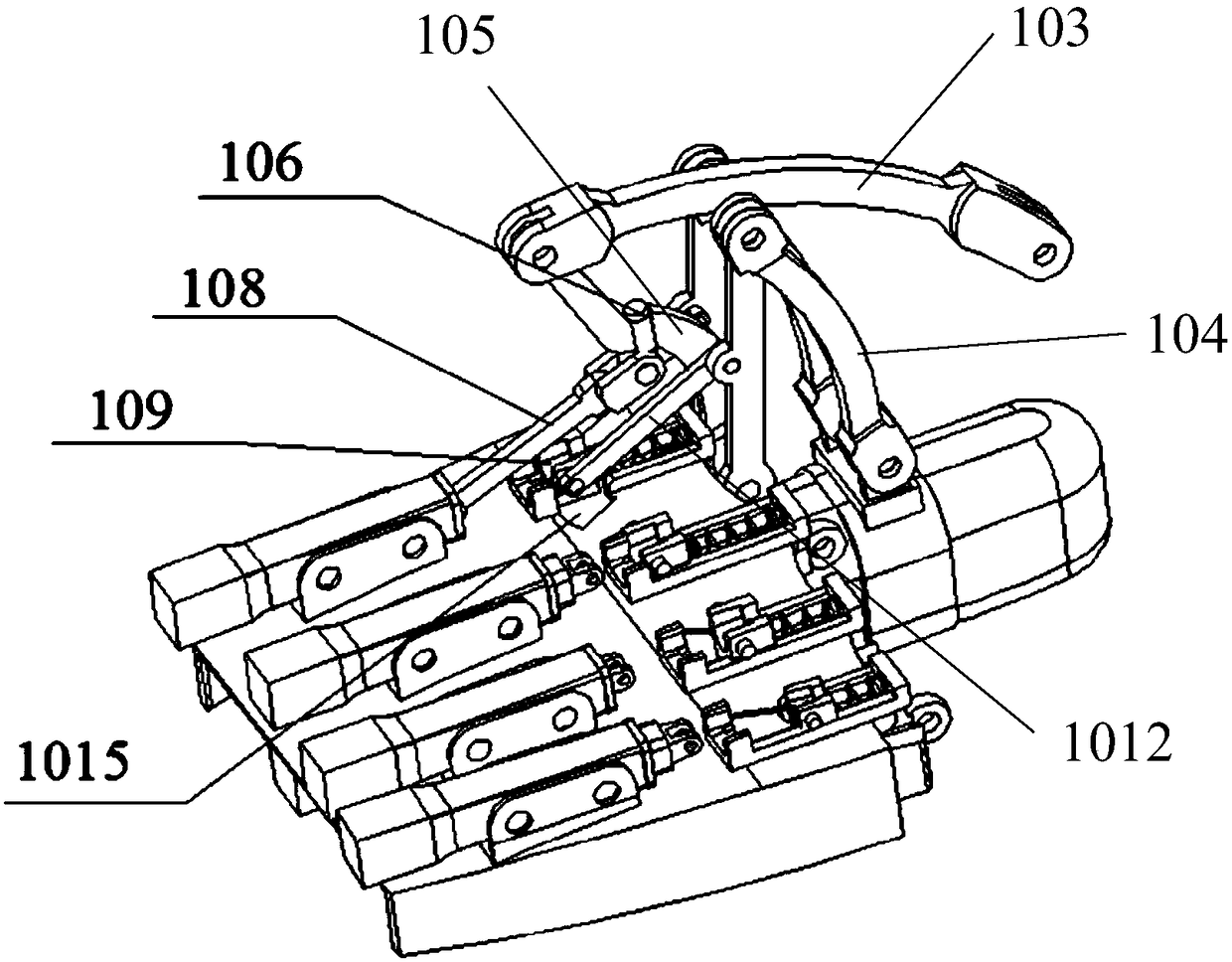
Exoskeleton seven-degree-of-freedom rehabilitation manipulator
A technology of degrees of freedom and manipulators, applied in the field of rehabilitation robots, can solve the problems of inability to apply active treatment and less freedom of joint movement, and achieve the effect of rich functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
[0050] The present invention solves the problem that the current finger rehabilitation mechanism cannot realize the four-finger stretching action and the mutual independent bending action function of the MP and PIP joints of the fingers. Each has an independent bending degree of freedom, while the MP joint has an associated bending degree of freedom, and the four fingers have an extension degree of freedom. This rehabilitation mechanism can realize the stretching and opening movement of the four fingers,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More