

A method for automatic speed change of a robot
A robot and automatic variable speed technology, applied in the field of robot control, can solve the problems of poor robot walking speed, troublesome and complicated walking speed, etc., and achieve the effect of simplifying the walking operation process, improving the accuracy and saving human resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
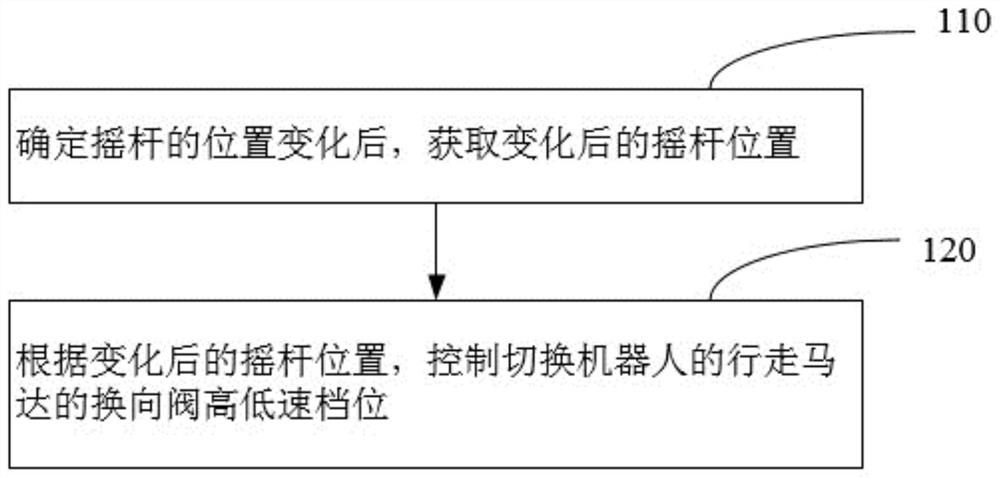
[0028] like Figure 1A As shown, the present embodiment provides a method for automatically changing the speed of a robot. The above-mentioned robot includes a crawler and a rocker connected to the above-mentioned crawler. When the method is applied to the remote control operation of the above-mentioned robot, it specifically includes the following steps:
[0029] Step 110, after determining that the position of the rocker has changed, obtain the changed rocker position;
[0030] In practice, the above-mentioned track includes a left track and a right track, and the rocker includes a left rocker connected to the left track of the robot and a right rocker connected to the right track of the robot;
[0031] Obtain the current position of the robot's left stick / right stick on the left track / right track respectively according to the instructions of the remote controller that controls the position change of the stick;
[0032] The combination of the current position of the left roc...
Embodiment 2
[0089] Based on the same inventive concept, the embodiment of the present invention also provides a device for controlling the self-variable speed of the robot, such as Figure 2A As shown, the device includes a processor 201 and a memory 201, wherein the processor is used for:
[0090] After determining the position change of the joystick, obtain the changed joystick position;
[0091] According to the changed position of the rocker, the high and low speed gears of the reversing valve of the walking motor of the robot are controlled and switched.
[0092] The above-mentioned processor is also used for determining whether to change the engine speed according to the current load value of the above-mentioned robot.
[0093] The above-mentioned processor is specifically used to obtain the current positions of the left rocker / right rocker of the robot on the left crawler / right crawler respectively according to the instructions of the remote controller controlling the change of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More