

Clamp control method for unequal-diameter long rod
A control method and a technology for long rods, which are applied in the field of fixture control for long diameter rods, and can solve problems such as inconvenient construction operations, large failures in operation errors, and instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with specific embodiment, this case is described in further detail.
[0039] This case involves a fixture control method for unequal-diameter long rods, the steps are as follows:
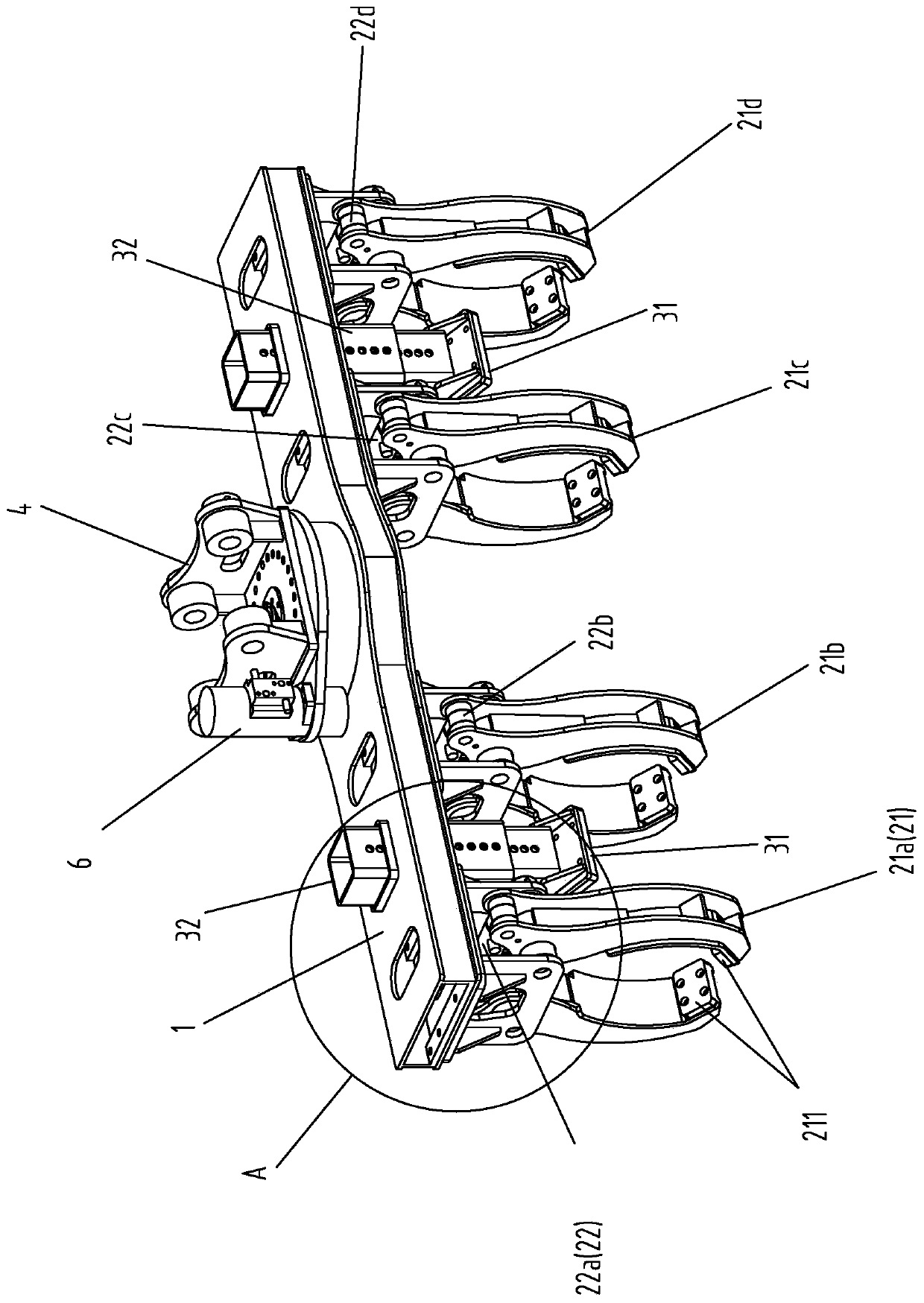
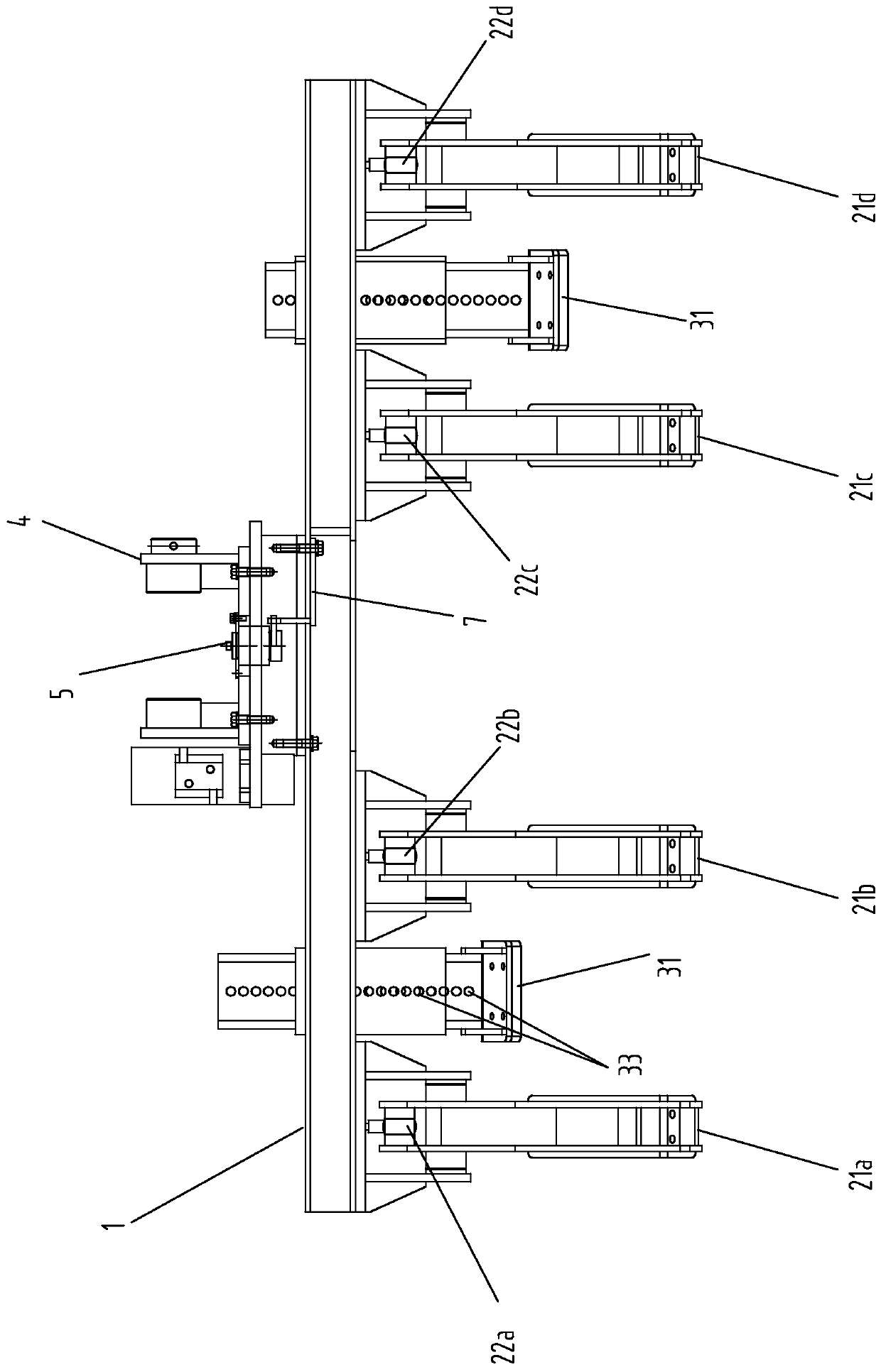
[0040] 1) The gripper controls the complete opening of each gripping group of at least two gripping units through the joint action of each gripping oil cylinder of at least two gripping units;
[0041] Each gripping unit has a one-to-one corresponding gripping group and a gripping cylinder, and the gripping cylinder controls the gripping group to open or close. The operation modes of all the gripping cylinders of the at least two gripping units are associated joint actions, specifically, the telescoping actions of each gripping cylinder are synchronized and the actual telescoping distances are flexibly allocated and adjustable to each other.
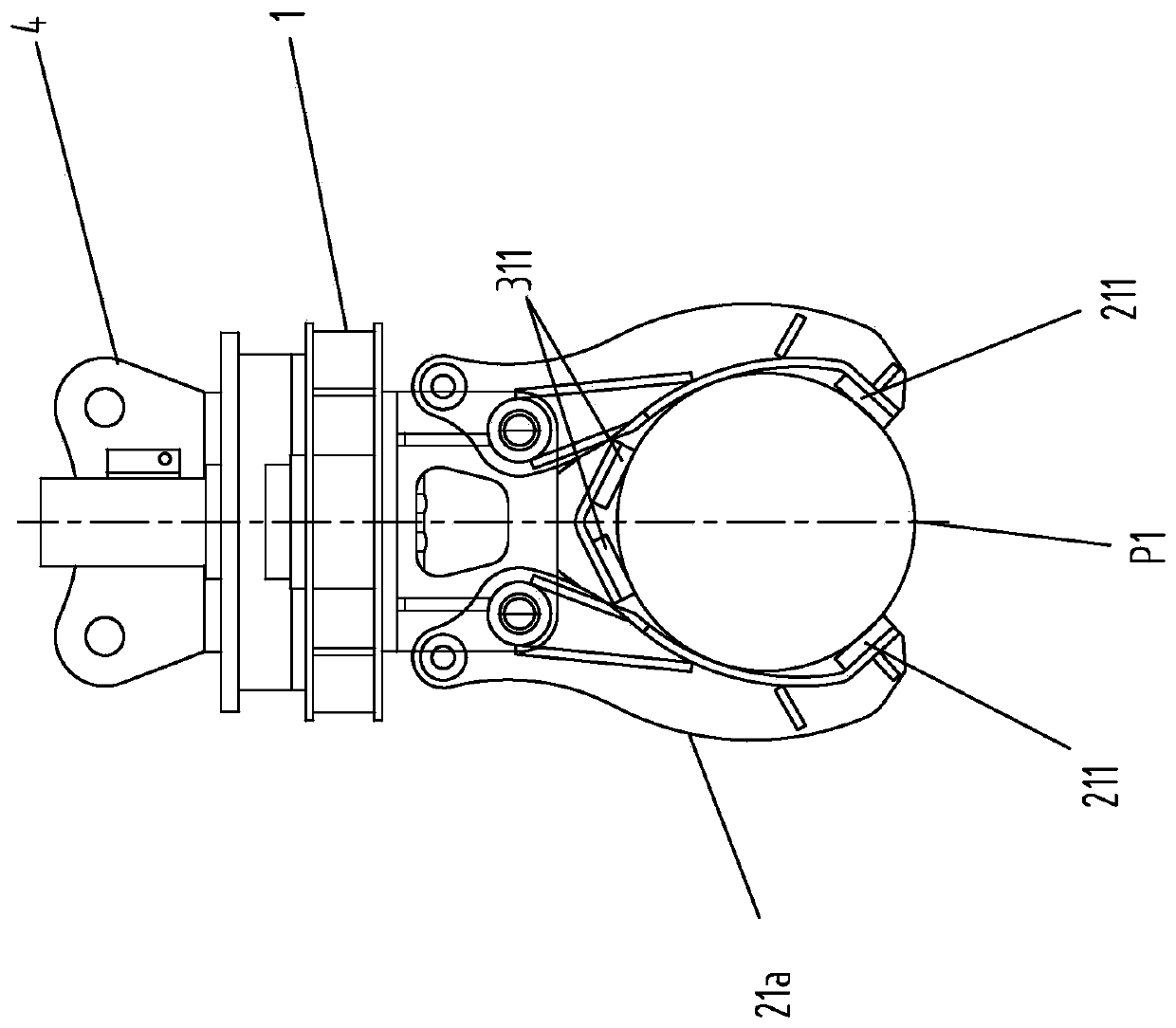
[0042] 2) The positional relationship between the clamp and the unequal-diameter long rod to be clamped is such that the clamp ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More