

Method for estimating attitude and parameters of non-cooperative spacecraft without gyroscope
A non-cooperative, spacecraft technology, applied in the field of spacecraft navigation, can solve problems such as relative navigation not applicable to non-cooperative spacecraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be further described below in conjunction with the accompanying drawings.
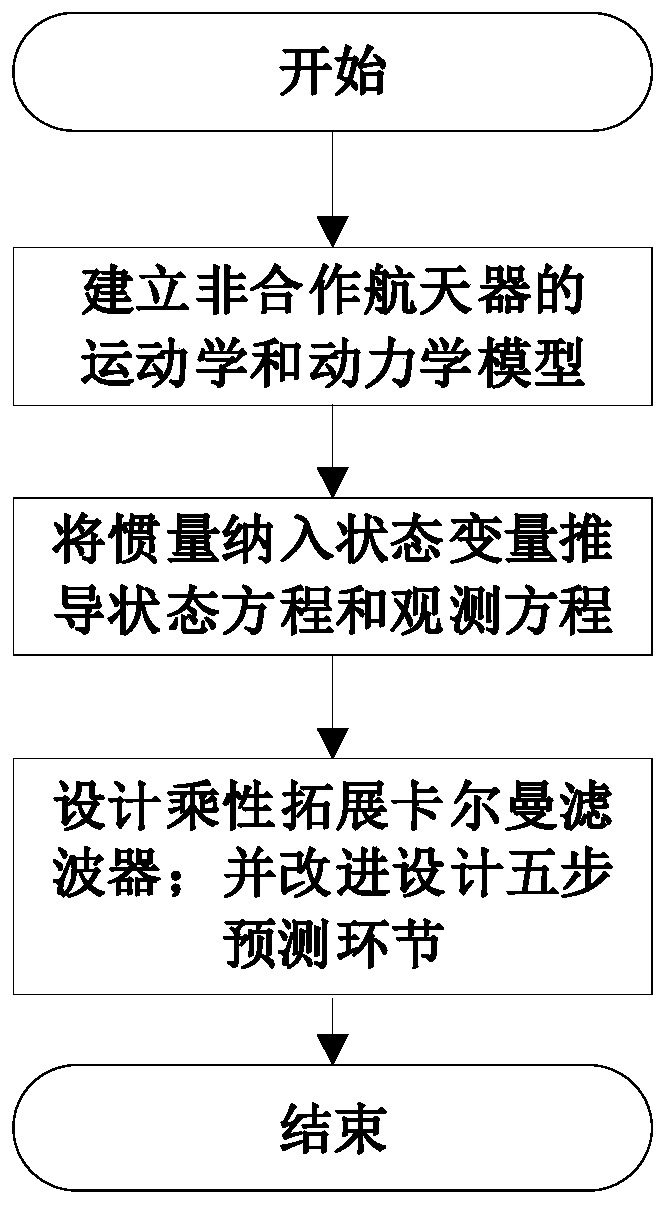
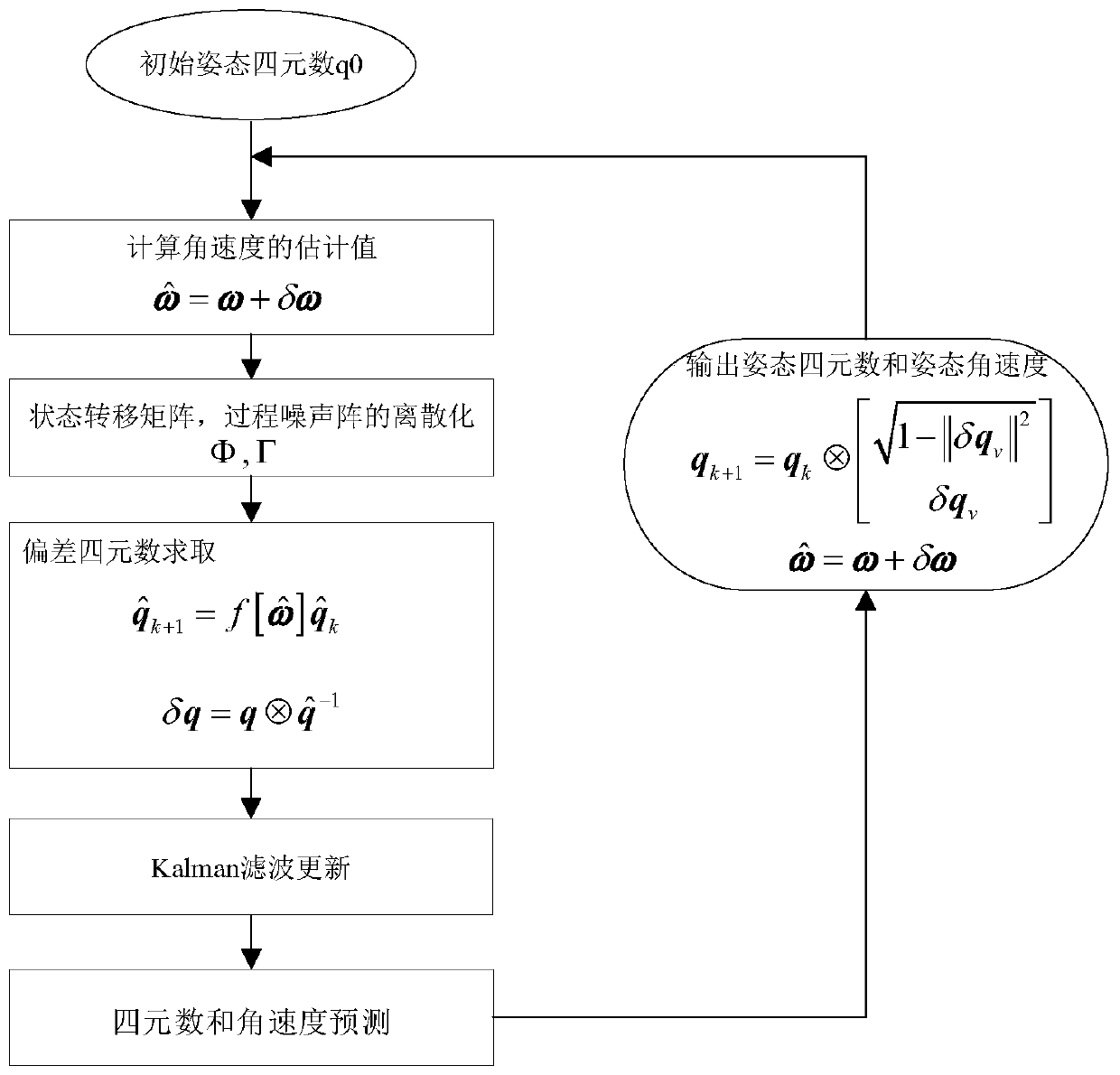
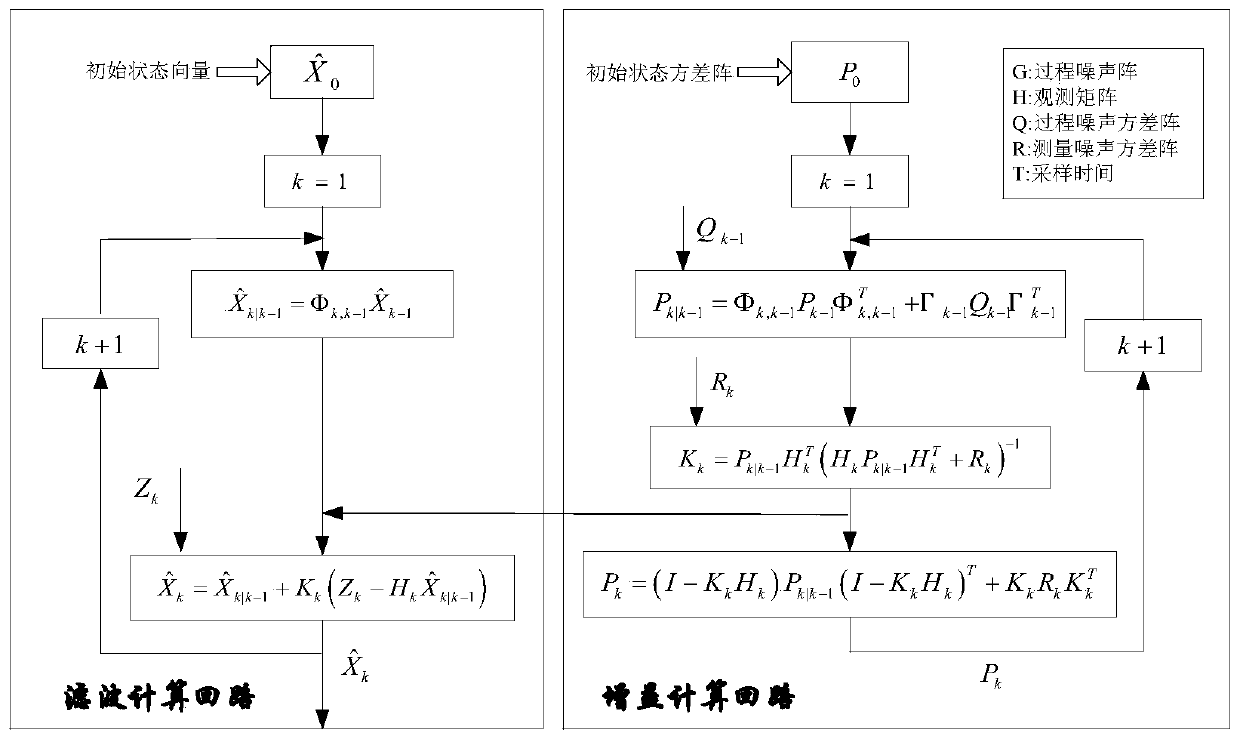
[0084] like figure 1 As shown, the method for estimating the attitude and parameters of non-cooperative spacecraft without gyroscopes in the present invention includes: first, considering the problem that the target coordinate system does not coincide with its body coordinate system, and establishing a relative target non-cooperative spacecraft coordinate system. The attitude kinematics and dynamics model of a fast-rolling non-cooperative spacecraft; then, the relative attitude quaternion vector part, the error of the three-axis rotation angular velocity and the moment of inertia ratio are selected as filtering variables, and the discrete state equation and Observation equation; finally, the multiplicative extended Kalman filter is designed, and the design of five-step prediction is improved to improve the filtering estimation accuracy and follow-up speed, and solve th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More