

A method for cleaning the working surface of a sweeping robot
A technology for sweeping robots and working surfaces, applied in robot cleaning machines, manual sweeping machines, carpet cleaning, etc., can solve the problems of low cleaning efficiency of sweeping robots, improve visual cleanliness, improve cleaning efficiency, and reduce idle running and idling. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
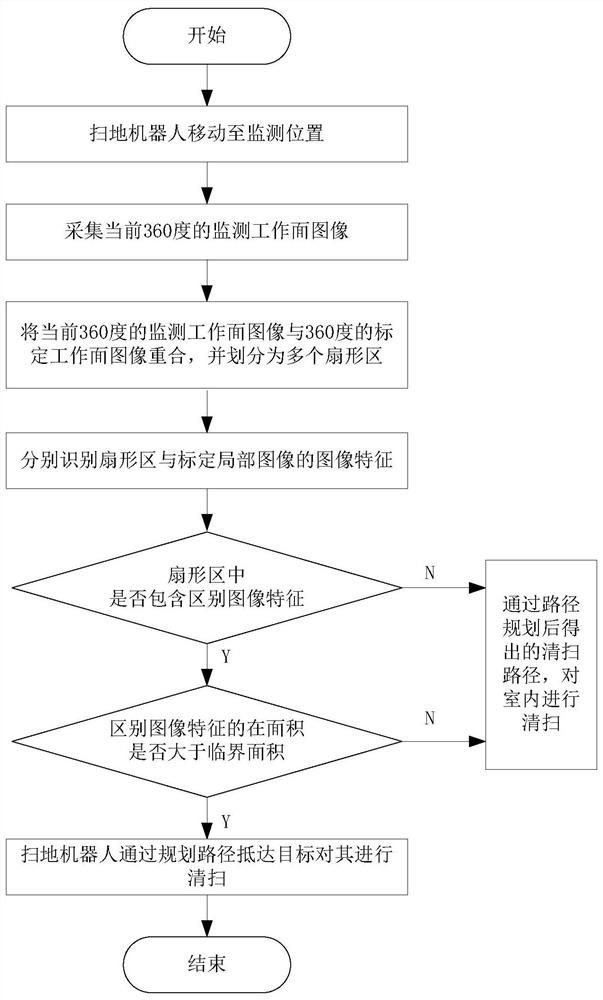
[0060] Such as figure 1 Shown:
[0061] S1. Move the sweeping robot to the monitoring position under the guidance of the space map of the working surface;
[0062] S2. Take a 360° image of the monitoring work surface with the monitoring position as the center through the sweeping robot;
[0063] When the sweeping robot reaches the monitoring position, keep the sweeping robot still, rotate the image acquisition device of the LDS component on the sweeping robot, and take a 360° monitoring image of the monitoring work surface centered on the monitoring position, that is, keep the sweeping robot still and rotate the image acquisition Equipment; the image of the monitoring working surface captured is superimposed on the calibration image of the monitoring position, and the equal rotation angle is divided into multiple fan-shaped areas, and the accuracy of the comparison between the image of the monitoring working surface captured and the calibration image of the monitoring positio...
Embodiment 2
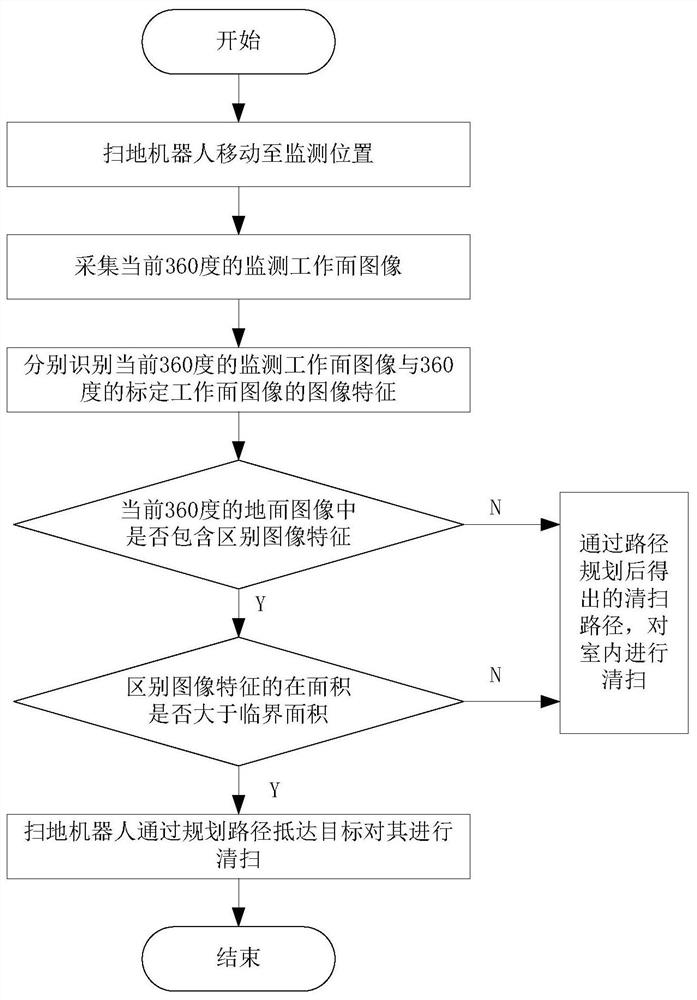
[0070] Such as figure 2 Shown:
[0071] S1. Move the sweeping robot to the monitoring position under the guidance of the space map of the working surface;
[0072] S2. Take a 360° image of the monitoring work surface with the monitoring position as the center through the sweeping robot;
[0073] When the sweeping robot arrives at the monitoring position, keep the sweeping robot and the image acquisition device of the LDS component on the sweeping robot relatively motionless, rotate the sweeping robot, and take a 360° monitoring working surface image centered on the monitoring position, that is, keep the image acquisition The equipment does not move and the sweeping robot rotates. The overall comparison can improve the speed of comparison between the captured monitoring face image and the calibration image of the monitoring position.
[0074] S3, comparing the image of the monitoring working face captured with the calibration image of the monitoring position, and obtaining ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More