

Highway cooperative vehicle lane changing control method under intelligent networking condition
A technology of expressway and control method, applied in the direction of road vehicle traffic control system, traffic control system, traffic flow detection, etc., can solve the problems of model failure, adjustment, response, and not considering the cooperative driving of vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0075] This embodiment is based on the following assumptions:
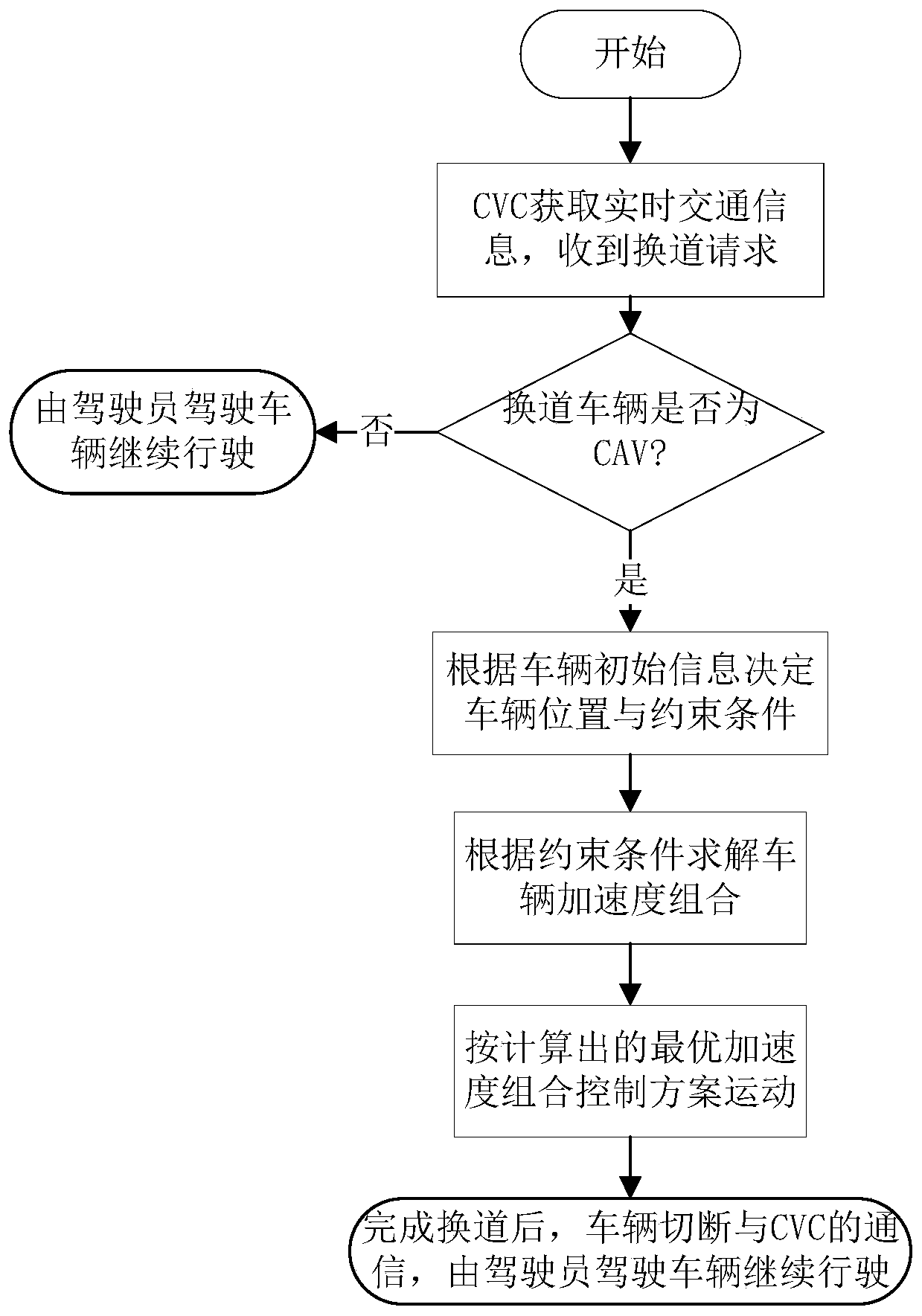
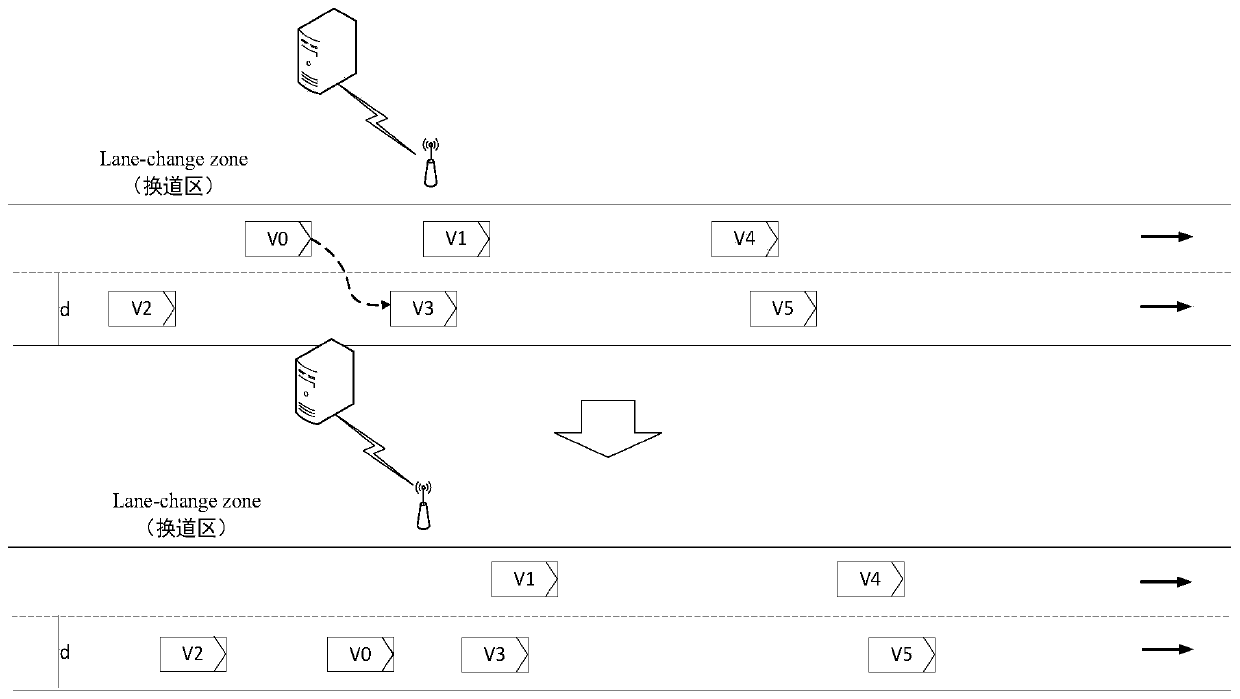
[0076] (1) The networked vehicle control center (CVC) is connected to multiple roadside devices, and the CVC can obtain real-time traffic information by means of vehicle volume networking and traffic detection;
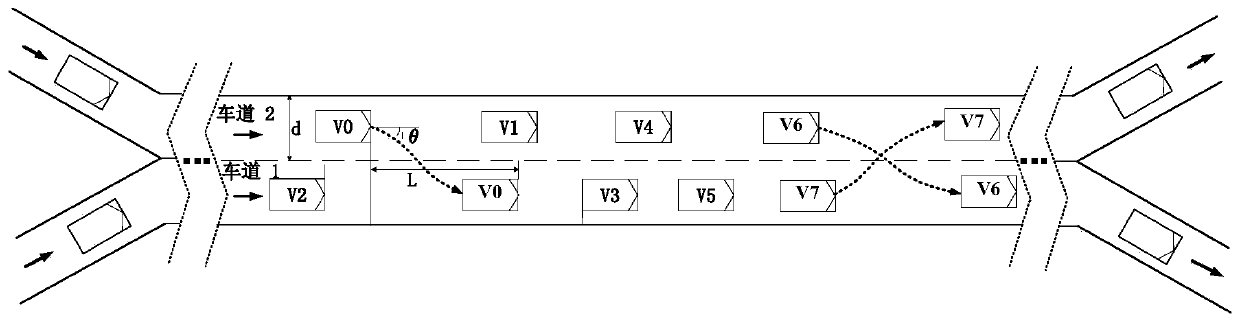
[0077] (2) Networked vehicles (CAV) and CVC are interconnected in real time. There are two lanes on the expressway for vehicles to drive, and the road width is d, and the CAV drives in strict accordance with the instructions sent by the CVC;
[0078] (3) Dedicated short-range communication technology (DSRC) is used for information exchange between CAV and CVC, and there is no packet loss during the communication process, and the transmission delay is small enough;
[0079] (4) The influence of grav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More