Camera Calibration Method and Terminal
A camera calibration and camera technology, which is applied in the field of image processing, can solve the problems that the world coordinate system is not meaningful to use, the world coordinate system is not unique, and the origin of the world coordinate system is inconvenient to choose, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
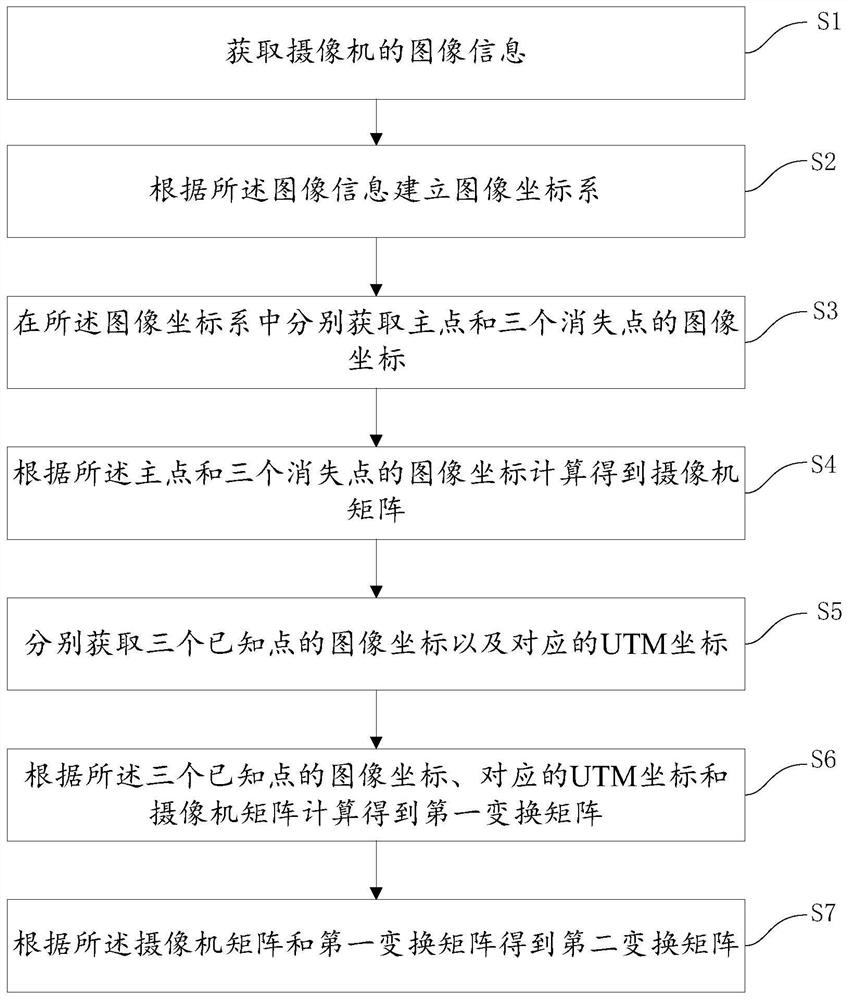
[0058] Please refer to figure 1 , Embodiment 1 of the present invention is a camera calibration method, comprising the following steps:
[0059] S1. Acquiring image information of a camera.
[0060] In this embodiment, it is assumed that the image captured by the camera has no radial distortion, and the camera is looking straight ahead and downward.
[0061] S2. Establish an image coordinate system according to the image information.
[0062] The coordinate origin of the image coordinate system can be set at the upper left corner of the picture, which can be a left-handed rectangular coordinate system or a right-handed rectangular coordinate system.
[0063] S3. Obtain the image coordinates of the main point and the three vanishing points respectively in the image coordinate system.
[0064] The main point can be freely selected, and the point in the center of the road can be selected, or the point not in the center of the road can be selected as the main point.
[0065] I...
Embodiment 2
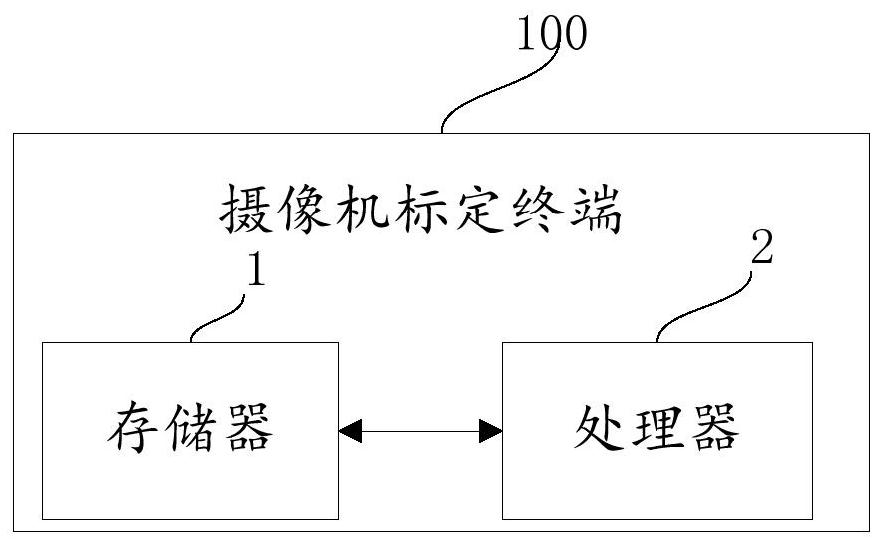
[0083] Please refer to figure 2 , the second embodiment of the present invention is:
[0084] A camera calibration terminal 100, corresponding to the method in Embodiment 1, includes a memory 1, a processor 2, and a computer program stored in the memory 1 and operable on the processor 2, and the processor 2 executes the When describing a computer program, the following steps are implemented:
[0085] Obtain the image information of the camera;
[0086] Establishing an image coordinate system according to the image information;
[0087] Obtaining the image coordinates of the main point and the three vanishing points respectively in the image coordinate system;
[0088] Calculate and obtain a camera matrix according to the image coordinates of the principal point and the three vanishing points;
[0089] Obtain image coordinates and corresponding UTM coordinates of three known points respectively;
[0090] Calculate the first transformation matrix according to the image coo...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap