An operation path planning and control method for an automatic pond water weed cleaning ship
A path planning and automatic cleaning technology, which is applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of missed turning, missed cutting of aquatic plants, and poor control accuracy of work boats. advanced questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The specific embodiments of the present invention are further described below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed embodiments and specific operating procedures are provided, but the scope of protection of the present invention is not limited to the following implementation.
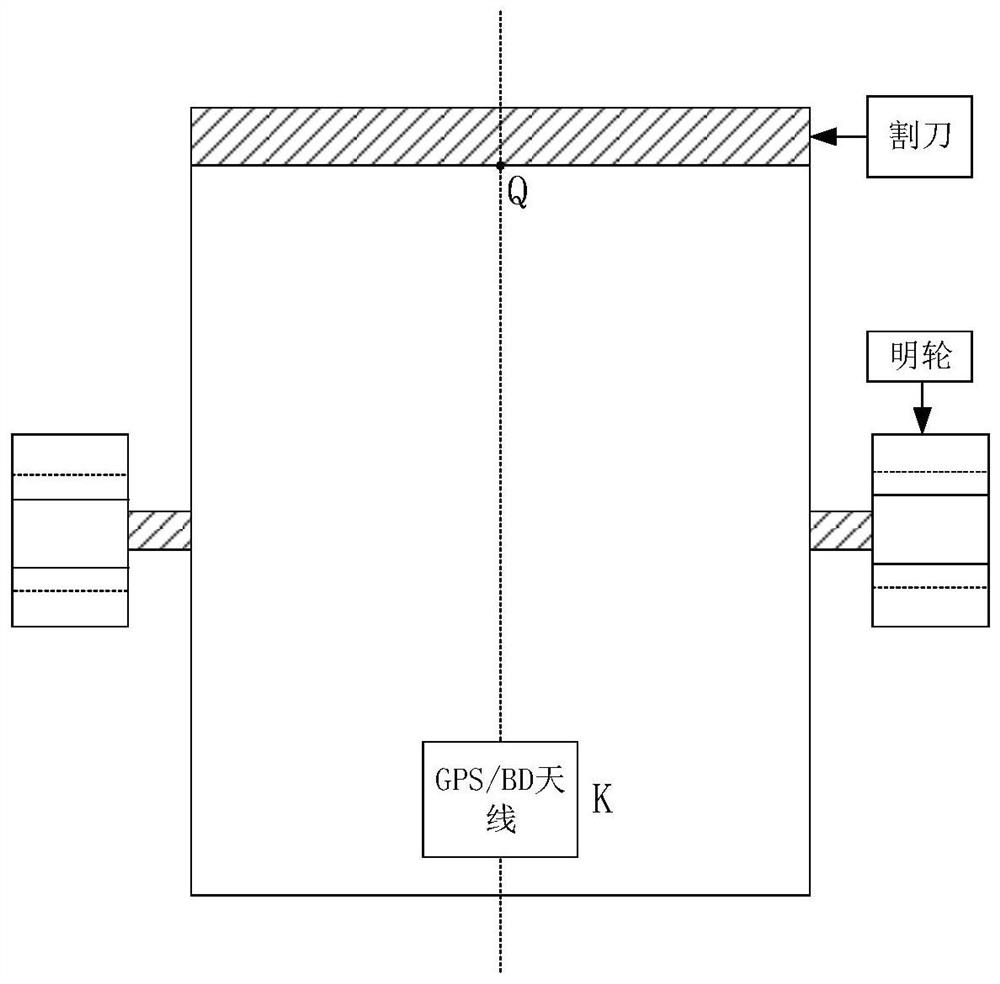
[0053] The structure of the aquatic weed cleaning ship that present embodiment adopts is as figure 1 As shown, the boat includes the hull, paddle wheels, cutters and GPS / BD navigation system.
[0054] The specific implementation steps are as follows:
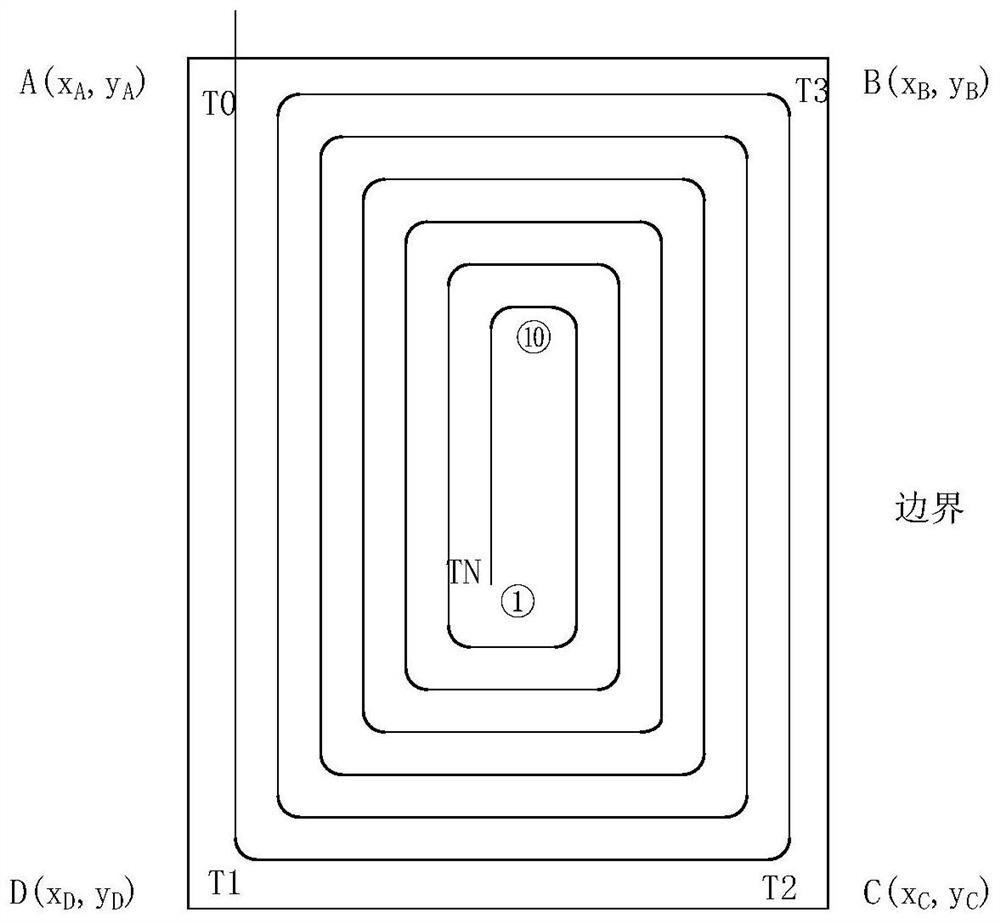
[0055] The first step is to set the operation boundary, number of operation circles and operation path of the operation boat.
[0056] Such as figure 2 As shown in the schematic diagram of the back-shaped operation planning, the present invention uses a high-precision GPS / BD navigation system to collect the coordinate position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com