Data-driven path planning method for unmanned underwater vehicle
An unmanned vehicle and path planning technology, applied in the field of underwater unmanned vehicle data-driven path planning, can solve the problems of lack of decision-making ability and low efficiency of area traversal algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings and embodiments. Many specific details are set forth in the following description to facilitate a full understanding of the present invention. However, the present invention can also be implemented in other ways than those described here. Therefore, the present invention is not limited to the specific embodiments disclosed below.
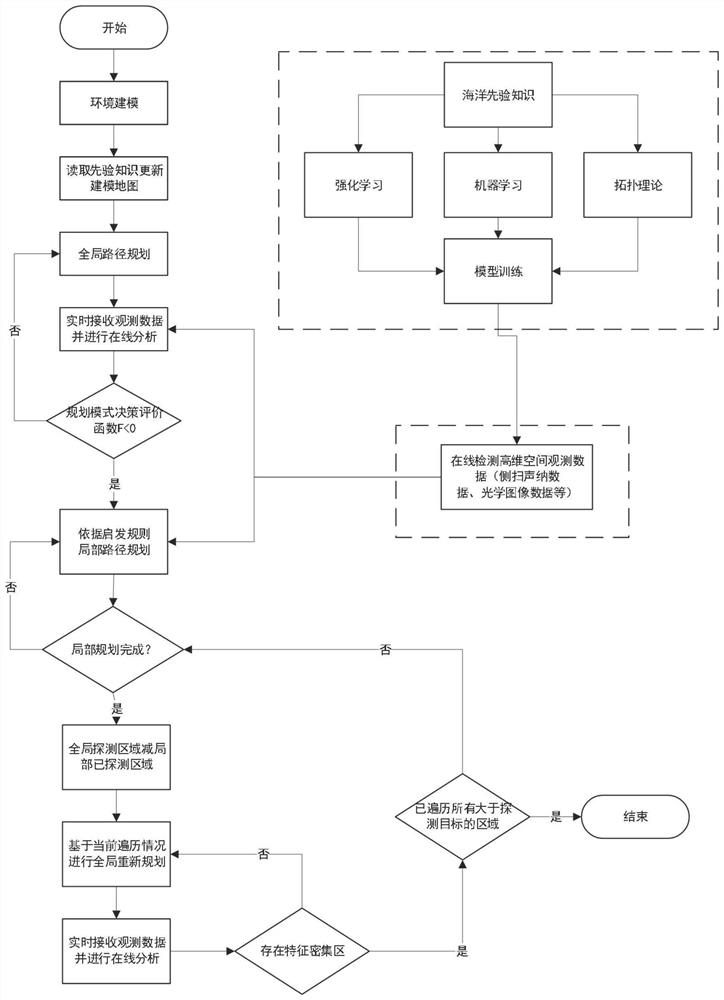
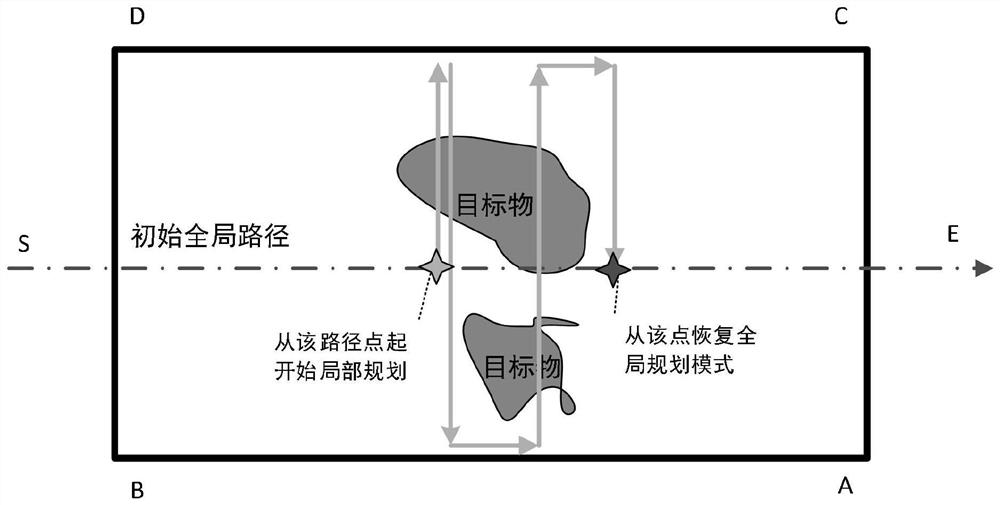
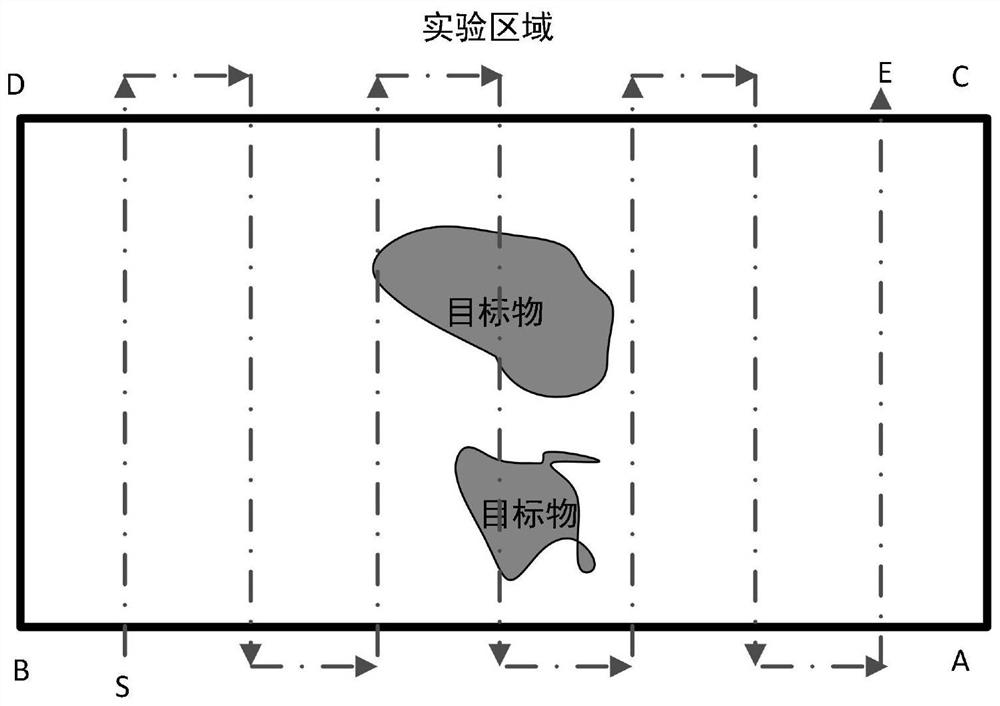
[0087]UUV (Underwater unmanned vehicle, underwater unmanned vehicle) works on the bottom of the water, and its attitude is greatly affected by ocean currents, which may affect the detection effect. Therefore, in order to improve the target detection effect and correspond to global planning and local planning, this scheme proposes the concept of rough scanning and fine scanning. Converted to known; fine scanning can also be called f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More