

Flexible tactile sensor based on transformer principle and flexible tactile detection system thereof
A tactile sensor and detection system technology, applied in the direction of force measurement, instrument, measurement force, etc. by measuring the change of magnetic properties of materials caused by applied stress, can solve the problem of electromagnetic tactile sensor electromagnetic interference, high sensitivity and large range It is impossible to take into account the problems such as high sensitivity, good durability and wide measurement range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
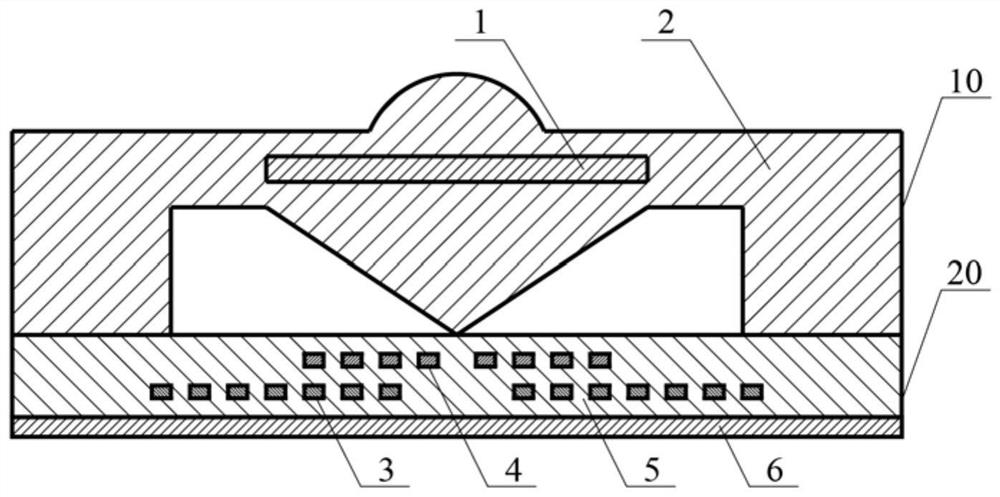
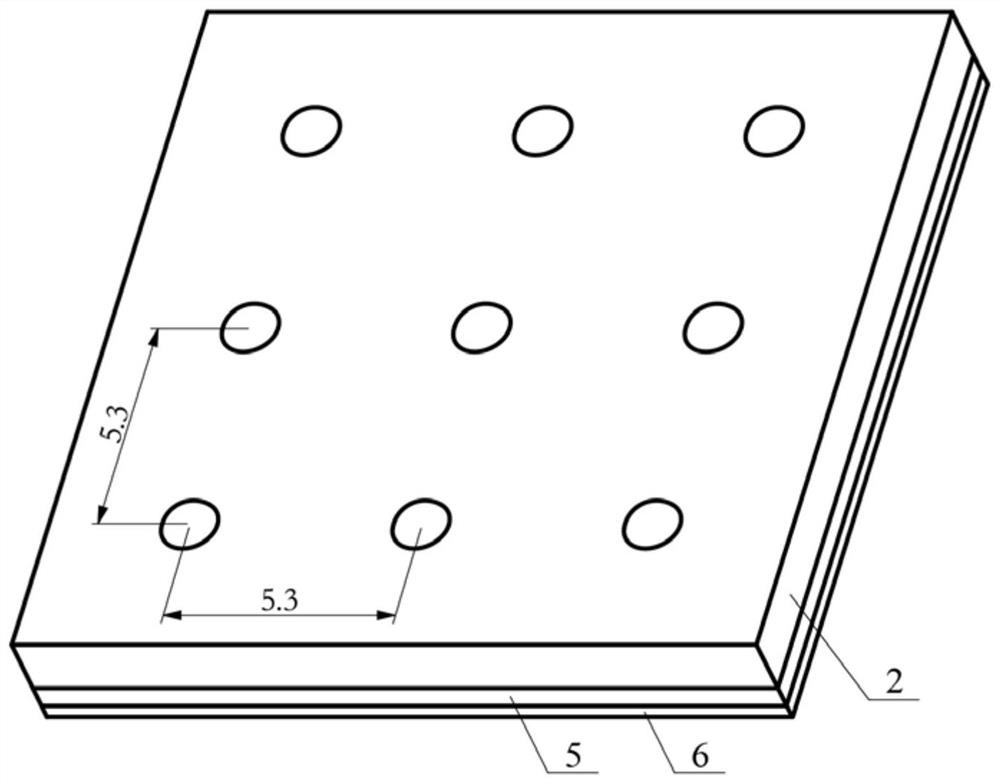
[0035] Specific implementation mode one: the following combination figure 1 with figure 2 Describe this embodiment mode, a flexible tactile sensor based on the transformer principle described in this embodiment mode, the sensing unit of the sensor includes a sensitive layer 10, a signal conversion layer 20 and an electromagnetic shielding layer 6 arranged in sequence from top to bottom;
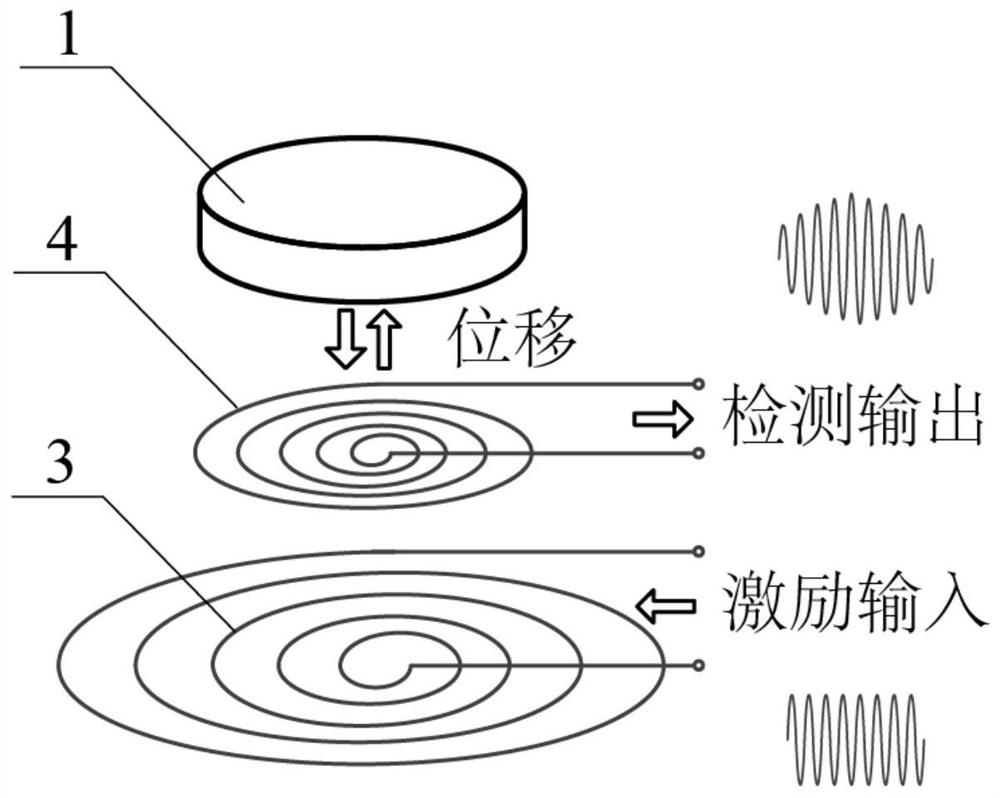
[0036] The sensitive layer 10 includes an elastic body 2 and a sensitive sheet 1 embedded in the middle of the elastic body 2; a cavity is opened in the middle of the bottom of the elastic body 2, and the inside of the cavity is an inverted conical structure, and the cone tip of the inverted conical structure is connected with the signal conversion layer 20 contacts, the top of the elastic body 2 is a raised hemispherical structure; the sensitive sheet 1 adopts a magnetic conductive sensitive sheet or a conductive sensitive sheet;
[0037] The signal conversion layer 20 includes a primary c...
specific Embodiment approach 2
[0051] Specific implementation mode two: the following combination Figure 4 Describe this embodiment, a flexible tactile detection system based on a flexible tactile sensor described in this embodiment, the detection system is implemented based on a flexible tactile sensor, and the detection system includes a flexible tactile sensor and a data acquisition system;
[0052] The data acquisition system includes an excitation source, a signal processing module and a data acquisition module;
[0053] The excitation source includes a wave generator and an operational amplifier, and the excitation signal generated by the wave generator is output to the primary coil 3 of the flexible tactile sensor through the operational amplifier;
[0054] The signal processing module includes an operational amplifier and a peak envelope detector, the operational amplifier amplifies the induced voltage output by the secondary coil 4 of the flexible tactile sensor and outputs it to the peak envelope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More